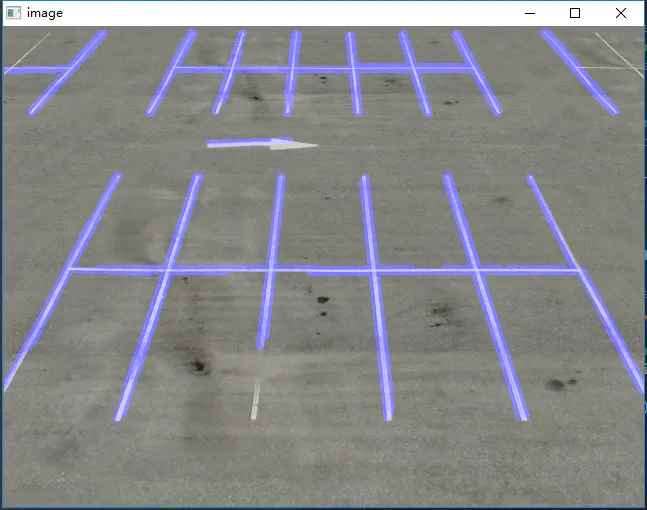
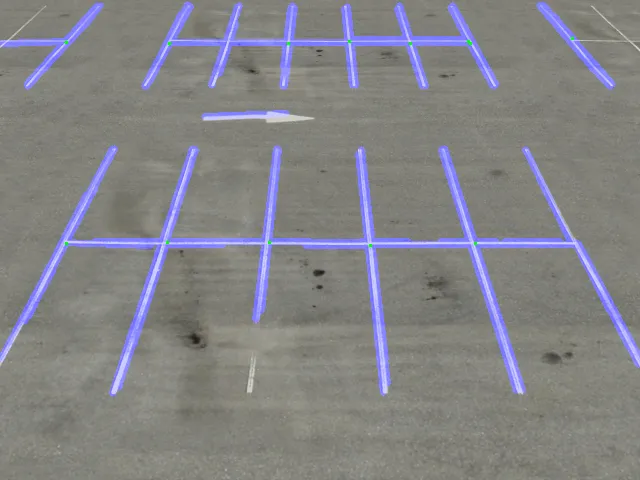
我正在尝试检测停车场中的线,如下所示。
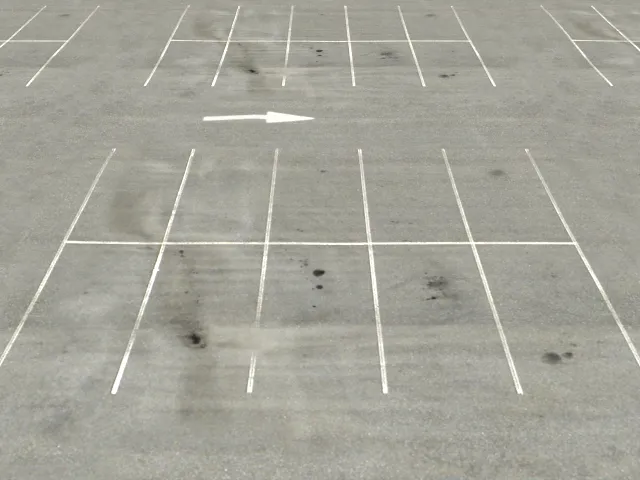
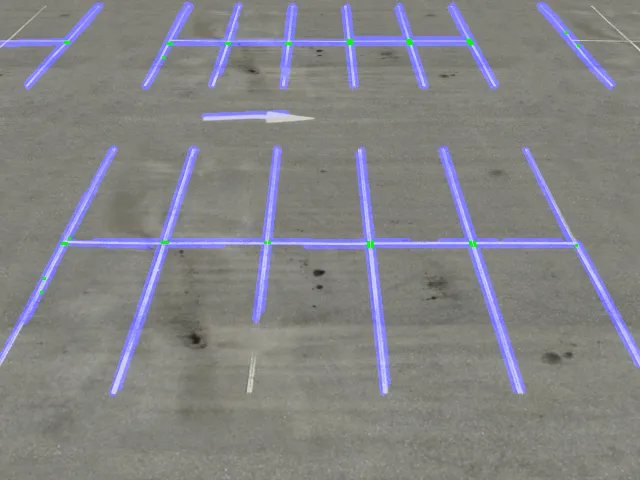
我希望得到明显的线条和交叉线的(x,y)位置。然而,结果并不是很理想。
我猜这是由于两个主要原因:
- 一些线非常断裂或缺失。即使人眼可以清楚地识别它们,HoughLine有时也会将一些缺失的线连接在一起,而且有时还会将不必要的线连接在一起,因此我更愿意手动完成。
- 有一些重复的线。
工作的一般流程如下所示:
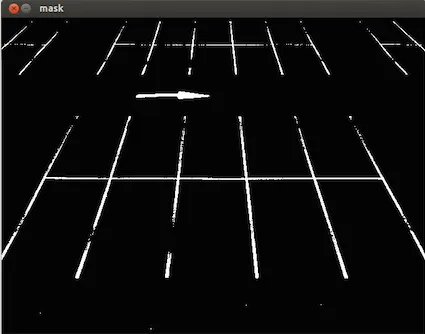
1. 选择一些特定的颜色(白色或黄色)
import cv2
import numpy as np
import matplotlib
from matplotlib.pyplot import imshow
from matplotlib import pyplot as plt
# white color mask
img = cv2.imread(filein)
#converted = convert_hls(img)
image = cv2.cvtColor(img,cv2.COLOR_BGR2HLS)
lower = np.uint8([0, 200, 0])
upper = np.uint8([255, 255, 255])
white_mask = cv2.inRange(image, lower, upper)
# yellow color mask
lower = np.uint8([10, 0, 100])
upper = np.uint8([40, 255, 255])
yellow_mask = cv2.inRange(image, lower, upper)
# combine the mask
mask = cv2.bitwise_or(white_mask, yellow_mask)
result = img.copy()
cv2.imshow("mask",mask)
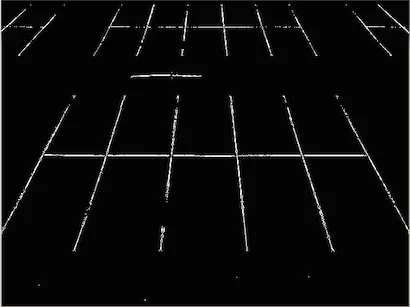
2. 重复膨胀和腐蚀操作直到图像不再改变 (参考)
height,width = mask.shape
skel = np.zeros([height,width],dtype=np.uint8) #[height,width,3]
kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (3,3))
temp_nonzero = np.count_nonzero(mask)
while(np.count_nonzero(mask) != 0 ):
eroded = cv2.erode(mask,kernel)
cv2.imshow("eroded",eroded)
temp = cv2.dilate(eroded,kernel)
cv2.imshow("dilate",temp)
temp = cv2.subtract(mask,temp)
skel = cv2.bitwise_or(skel,temp)
mask = eroded.copy()
cv2.imshow("skel",skel)
#cv2.waitKey(0)
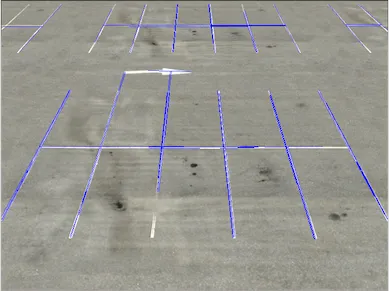
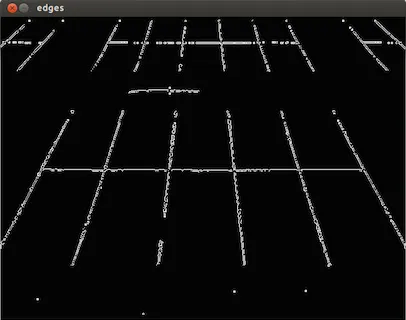
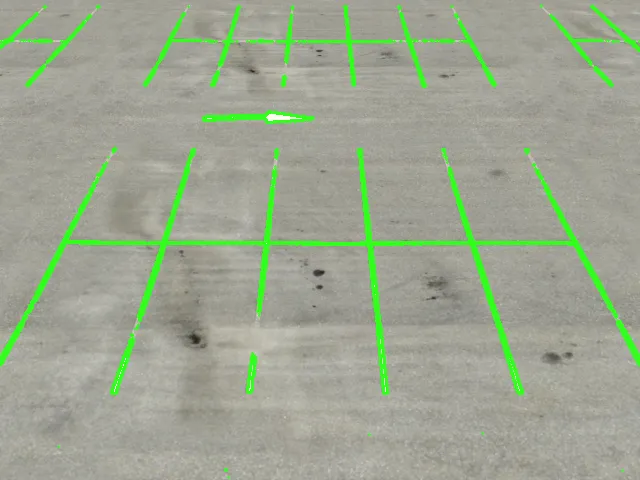
3. 运用Canny算法过滤线条,并使用HoughLinesP获取线条
edges = cv2.Canny(skel, 50, 150)
cv2.imshow("edges",edges)
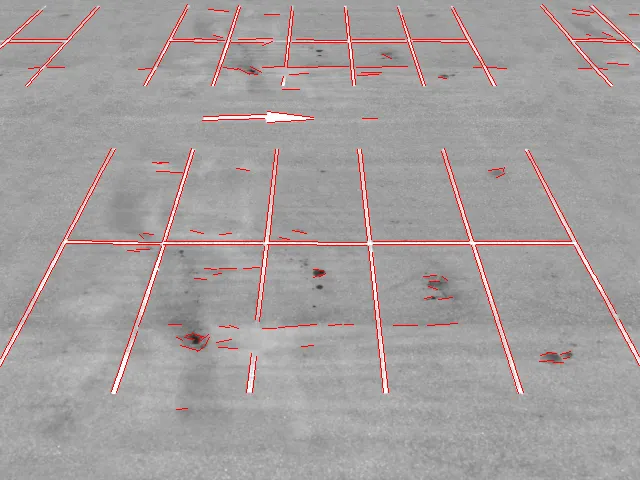
lines = cv2.HoughLinesP(edges,1,np.pi/180,40,minLineLength=30,maxLineGap=30)
i = 0
for x1,y1,x2,y2 in lines[0]:
i+=1
cv2.line(result,(x1,y1),(x2,y2),(255,0,0),1)
print i
cv2.imshow("res",result)
cv2.waitKey(0)
我想知道为什么在选择了特定颜色后,线条会出现断裂和噪声。我认为我们应该在这一步中做一些事情来使断裂的线变成完整、更少噪声的线。然后再尝试应用某些方法来进行卡尼和霍夫线变换。有任何想法吗?
HoughLinesP。 - alkasm