我正在尝试理解LSTMs的概念,并在Christopher Olah的这篇文章中找到了一些线索,该文章是用Keras实现的。我正在遵循Jason Brownlee撰写的Keras教程博客。我主要困惑的是:
注意:create_dataset接受长度为N的序列,并返回一个
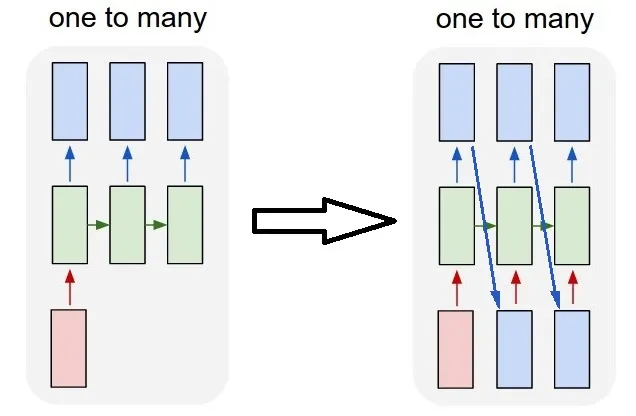
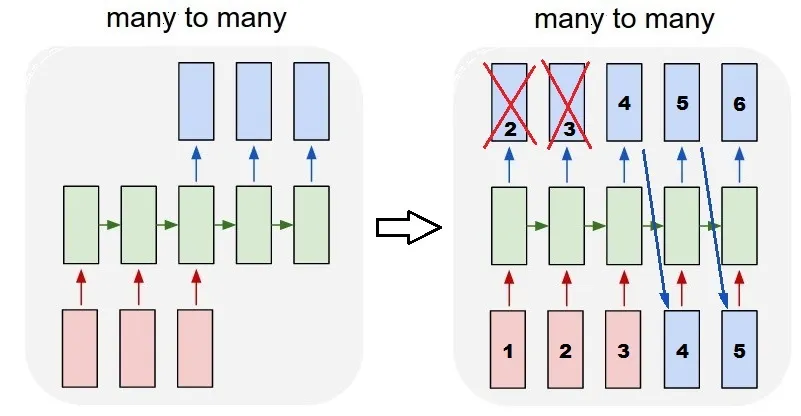
你有什么想法吗? 图像参考:http://karpathy.github.io/2015/05/21/rnn-effectiveness/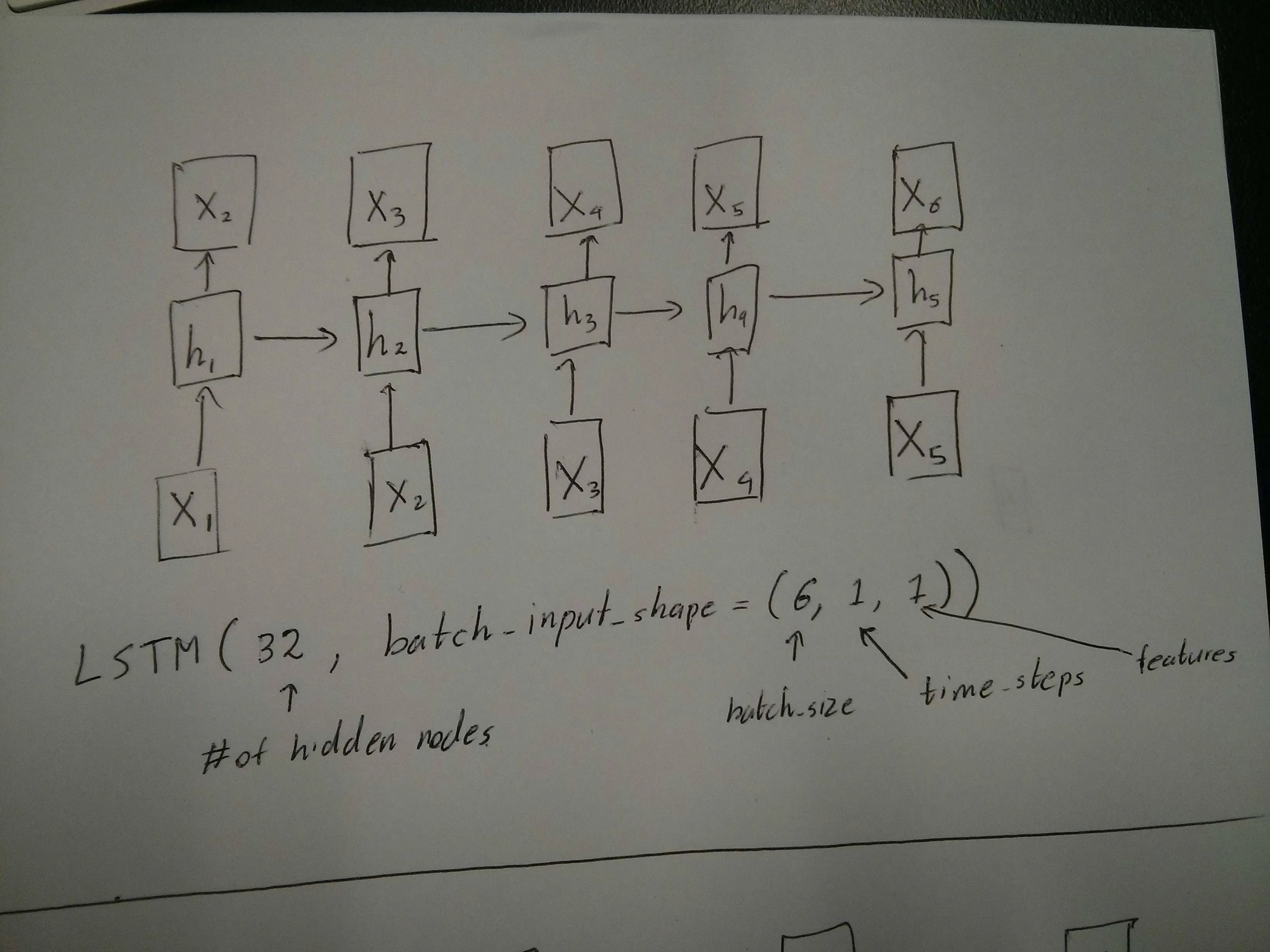
- 将数据序列重新塑造为
[samples, time steps, features] - 有状态的LSTMs
让我们针对上述两个问题集中讨论以下代码:
# reshape into X=t and Y=t+1
look_back = 3
trainX, trainY = create_dataset(train, look_back)
testX, testY = create_dataset(test, look_back)
# reshape input to be [samples, time steps, features]
trainX = numpy.reshape(trainX, (trainX.shape[0], look_back, 1))
testX = numpy.reshape(testX, (testX.shape[0], look_back, 1))
########################
# The IMPORTANT BIT
##########################
# create and fit the LSTM network
batch_size = 1
model = Sequential()
model.add(LSTM(4, batch_input_shape=(batch_size, look_back, 1), stateful=True))
model.add(Dense(1))
model.compile(loss='mean_squared_error', optimizer='adam')
for i in range(100):
model.fit(trainX, trainY, nb_epoch=1, batch_size=batch_size, verbose=2, shuffle=False)
model.reset_states()
注意:create_dataset接受长度为N的序列,并返回一个
N-look_back数组,其中每个元素都是一个长度为look_back的序列。
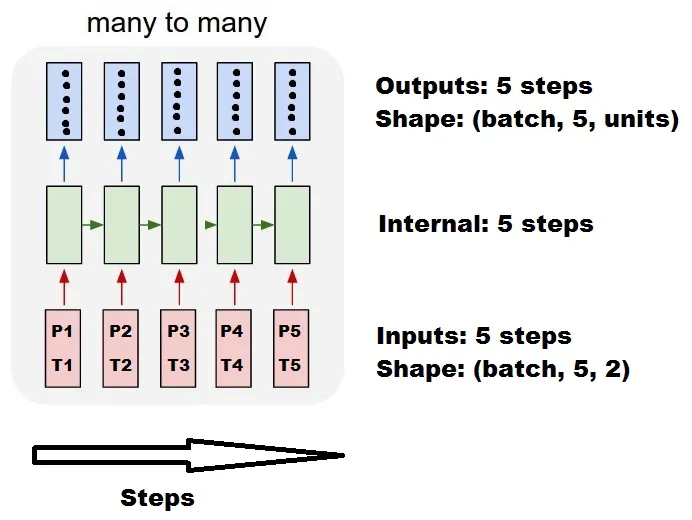
时间步和特征是什么?
可以看出,TrainX是一个三维数组,时间步和特征分别是最后两个维度(在此特定代码中为3和1)。关于下面的图片,这是否意味着我们考虑了“多对一”的情况,其中粉色框的数量为3?还是它确实意味着链长为3(即仅考虑3个绿色框)。 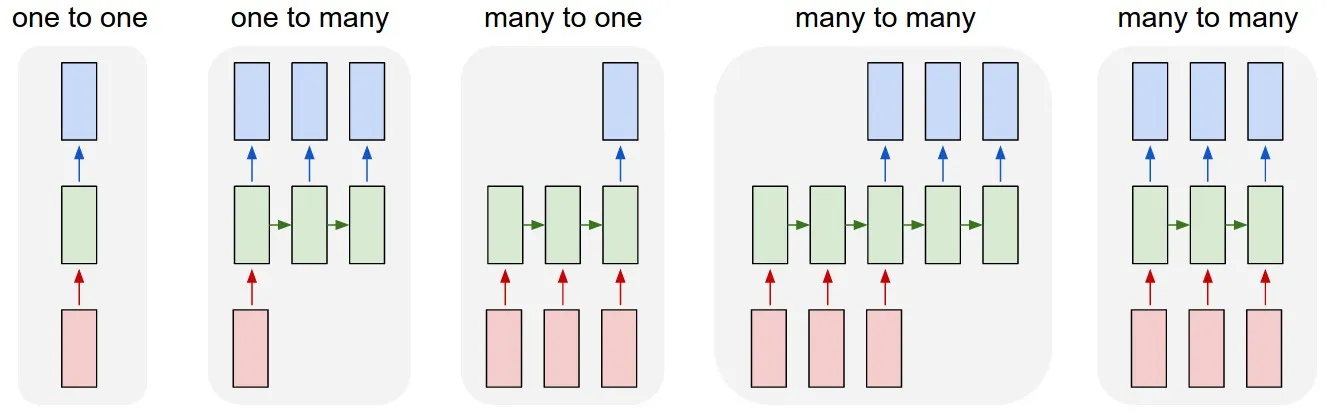
当我们考虑多变量序列时,features参数是否变得相关?例如同时建模两只金融股票?
有状态LSTMs
“stateful LSTMs”是指我们在批次运行之间保存单元格内存值吗?如果是这样,当batch_size 为1时,内存在训练运行之间被重置,那么说它是有状态的有什么意义呢?我猜这可能与训练数据未被随机洗牌有关,但我不确定如何解释。你有什么想法吗? 图像参考:http://karpathy.github.io/2015/05/21/rnn-effectiveness/
编辑1:
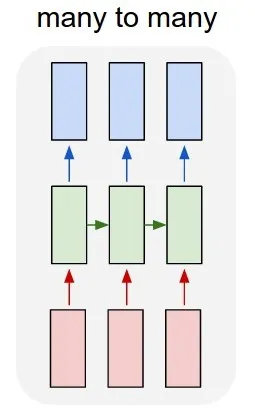
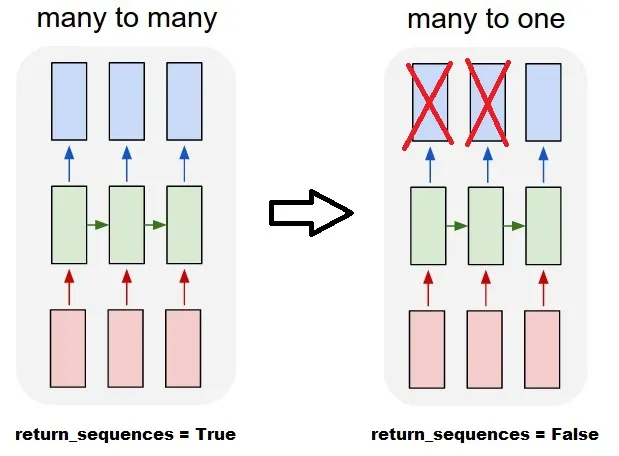
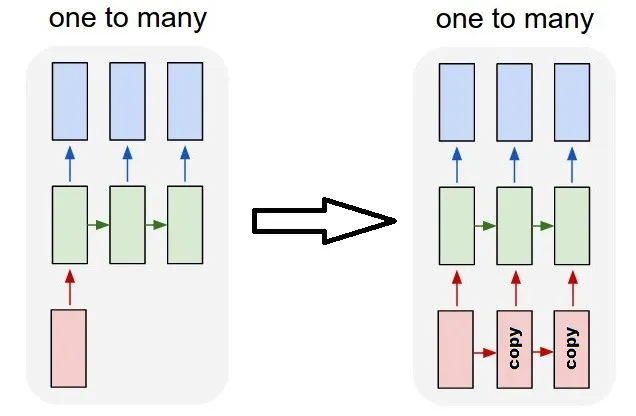
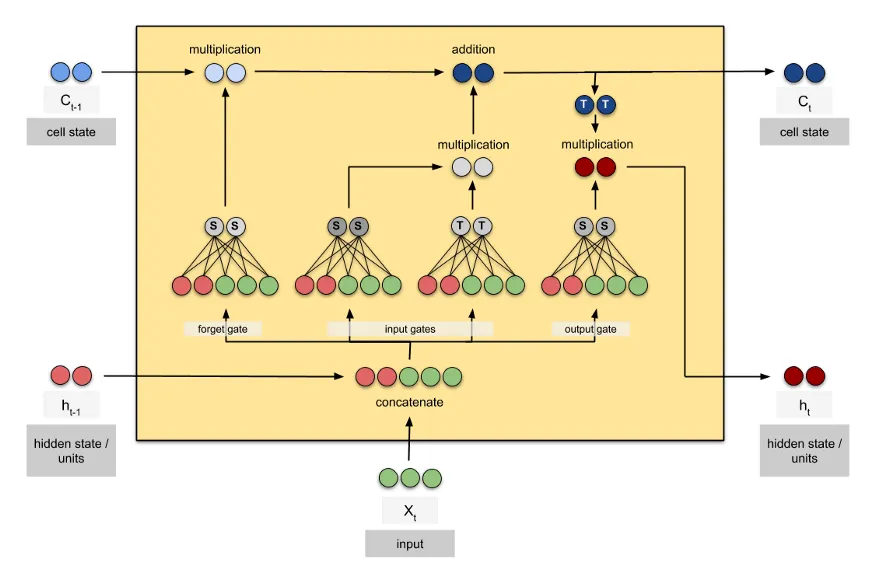
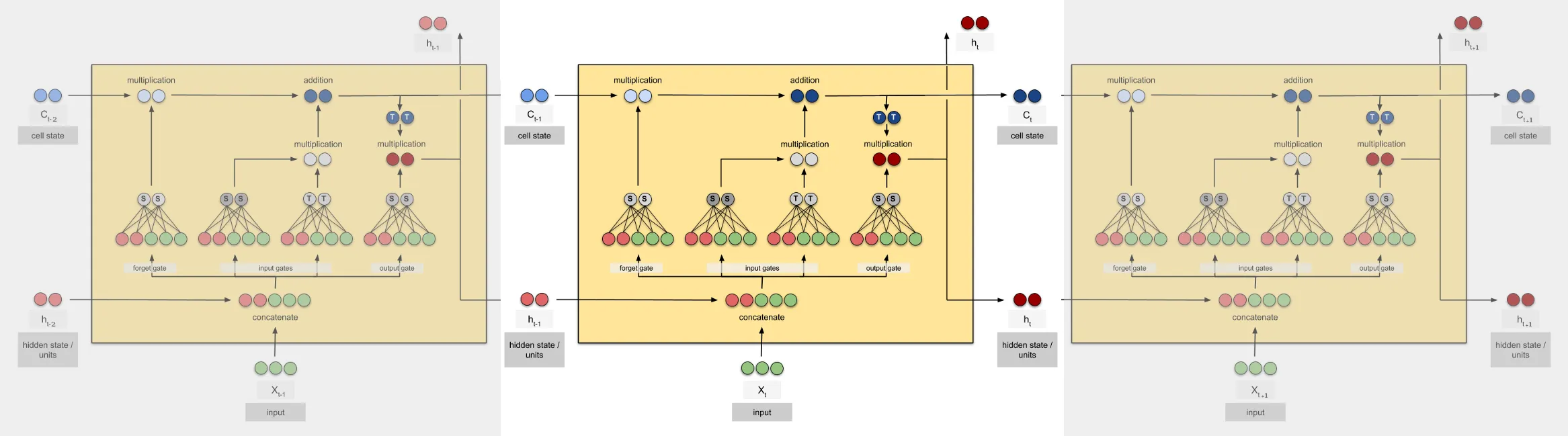
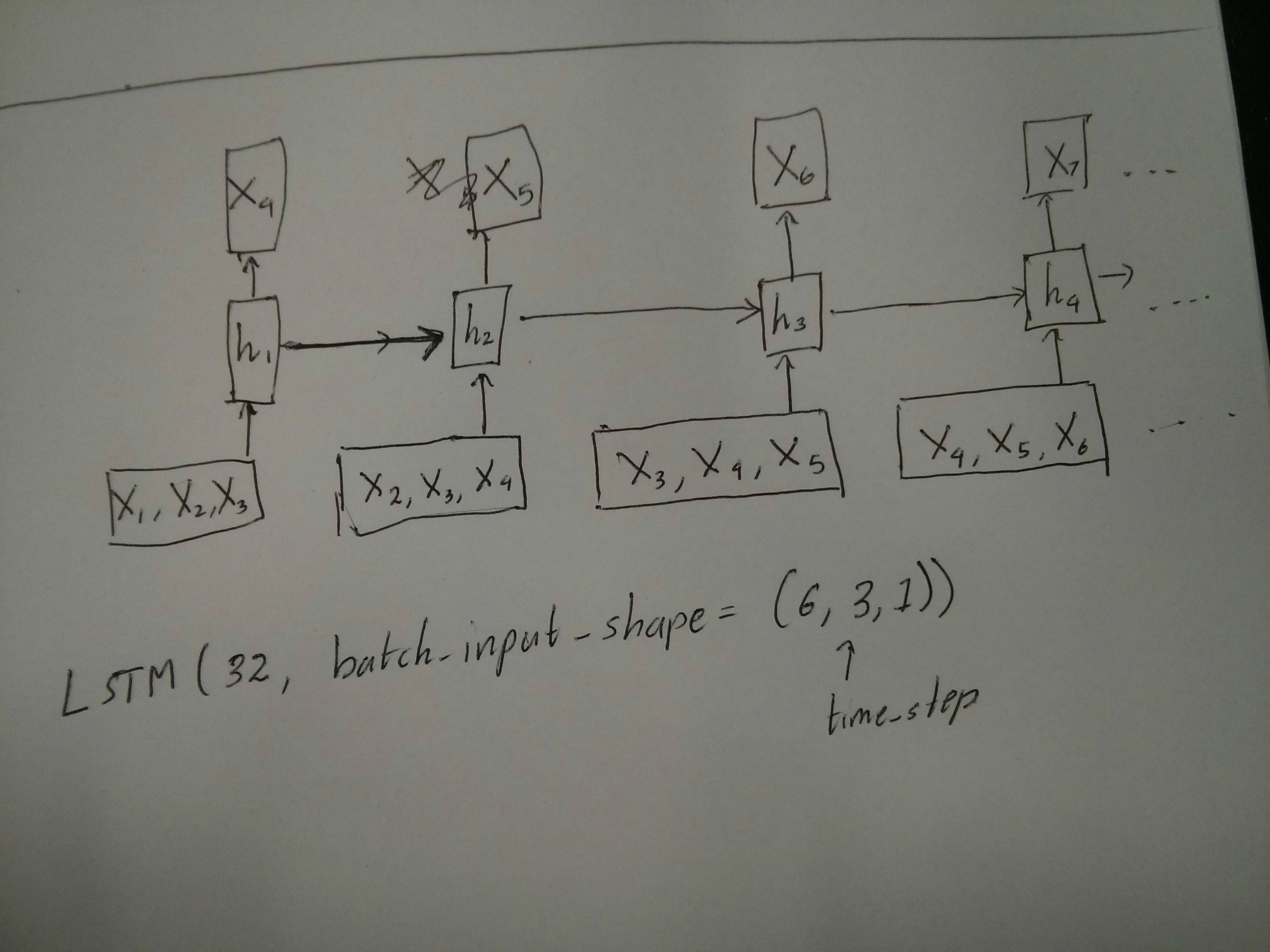
对于@van的评论中关于红色和绿色框相等的部分有些困惑。所以只是确认一下,以下API调用是否对应于展开的图表?特别是注意第二个图表(batch_size 是任意选择的):
编辑2:
对于已经完成Udacity深度学习课程但仍然对time_step参数感到困惑的人,请查看以下讨论:https://discussions.udacity.com/t/rnn-lstm-use-implementation/163169
更新:
结果发现model.add(TimeDistributed(Dense(vocab_len)))是我正在寻找的。这里有一个例子:https://github.com/sachinruk/ShakespeareBot
更新2:
我在这里总结了我对LSTM的大部分理解:https://www.youtube.com/watch?v=ywinX5wgdEU