从三维周期信号中收集了100个周期。波长略有变化。波长的噪声遵循零均值的高斯分布。良好的波长估计已知,这不是问题。幅度的噪声可能不是高斯的,并且可能被离群值污染。
如何计算一个单周期,以最佳方式近似所有收集的100个周期?
时间序列、ARMA、ARIMA、卡尔曼滤波、自回归和自相关似乎是关键词。
更新1:我不知道时间序列模型如何工作。它们准备好处理变化的波长了吗?它们能处理非平滑的真实信号吗?如果拟合了时间序列模型,我可以计算单个周期的“最佳估计”吗?怎么做?
更新2:一个相关的问题是this。速度在我的情况下不是问题。处理是离线完成的,在收集所有周期之后。
问题起源:我以200Hz的频率测量人类步伐时的加速度。然后,我尝试对数据进行双重积分,以获取重心的垂直位移。当然,噪声在二次积分时会引入巨大误差。我想利用周期性来减小这种噪声。下面是6个步骤(1个左脚和1个右脚为一个周期)对应3个周期的实际数据的粗略图形(y轴:加速度,单位为g;x轴:时间,单位为秒)。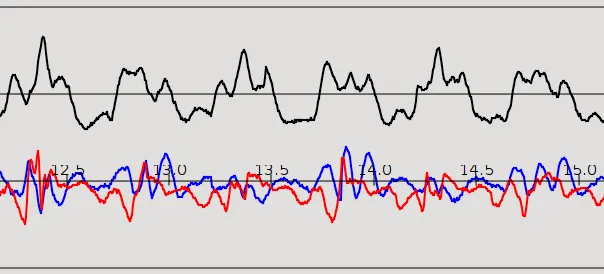
我现在的兴趣纯粹是理论性的,因为http://jap.physiology.org/content/39/1/174.abstract提供了一个非常好的操作步骤。