我有两个2D旋转矩形,由一个(中心x,中心y,高度,宽度)和旋转角度(0-360°)定义。如何计算这两个旋转矩形的交集面积。
在Python中计算两个旋转矩形的相交区域面积
20
- user824624
6
将顶点投影到轴上并检查这些点的交点。 - Netwave
6可能是旋转矩形的两个交集的面积的重复问题。 - custom_user
1这并不是一个软件工程问题,而是一个数学问题。 - Philipp
5作为数学问题,对于数学家来说很正常。作为一名软件工程师,我在碰撞检测、OCR、计算机视觉和其他需要功能代码的系统中遇到过这种类型的问题,而不是数学理论。 - Bug
我们可以假设两条边不共线吗? - Jared Goguen
这里有一个关于多边形面积计算的很好的解释:https://www.youtube.com/watch?v=0KjG8Pg6LGk。结合链接和提示,以及相关问题(区域:交集=多边形1+多边形2-聚合多边形),缺失的部分是将您的数据转换为顶点的(x,y)坐标。即一些简单的正弦和余弦计算。 - VPfB
3个回答
32
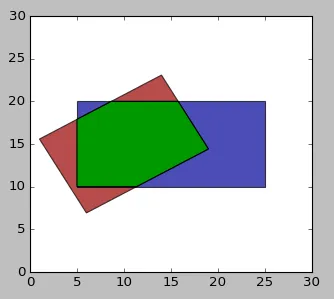
这种任务可以使用计算几何包来解决,例如Shapely:
import shapely.geometry
import shapely.affinity
class RotatedRect:
def __init__(self, cx, cy, w, h, angle):
self.cx = cx
self.cy = cy
self.w = w
self.h = h
self.angle = angle
def get_contour(self):
w = self.w
h = self.h
c = shapely.geometry.box(-w/2.0, -h/2.0, w/2.0, h/2.0)
rc = shapely.affinity.rotate(c, self.angle)
return shapely.affinity.translate(rc, self.cx, self.cy)
def intersection(self, other):
return self.get_contour().intersection(other.get_contour())
r1 = RotatedRect(10, 15, 15, 10, 30)
r2 = RotatedRect(15, 15, 20, 10, 0)
from matplotlib import pyplot
from descartes import PolygonPatch
fig = pyplot.figure(1, figsize=(10, 4))
ax = fig.add_subplot(121)
ax.set_xlim(0, 30)
ax.set_ylim(0, 30)
ax.add_patch(PolygonPatch(r1.get_contour(), fc='#990000', alpha=0.7))
ax.add_patch(PolygonPatch(r2.get_contour(), fc='#000099', alpha=0.7))
ax.add_patch(PolygonPatch(r1.intersection(r2), fc='#009900', alpha=1))
pyplot.show()
- Leon
7
嗨,您如何计算与此交集的面积? - Bug
1@Bug 一旦你获得了交叉区域的形状
r1.intersection(r2) (它是一个 Shapely 对象),你只需要访问它的 area 属性:r1.intersection(r2).area。 - Leonshapely真是太棒了! - Rick我已经通过pip install shapely安装了shapely,它显示Requirement already satisfied: shapely in /usr/local/lib/python2.7/dist-packages,但是当我运行代码时,它总是告诉我们ImportError: No module named affinity,有什么线索吗? - user824624
如果您有每个矩形的4个坐标,如何做到这一点? - Majid Azimi
显示剩余2条评论
22
这里有一个解决方案,不使用Python标准库之外的任何库。确定两个矩形相交的区域可以分为两个子问题:
- 找到相交的多边形(如果有); - 确定相交多边形的面积。
当您使用矩形的顶点(角落)时,这两个问题都相对容易。因此,首先必须确定这些顶点。假设坐标原点位于矩形的中心,顶点从左下角开始按逆时针方向排列:
一种简单的确定交集多边形的方法如下: 将一个矩形作为候选交集多边形。 然后应用顺序切割过程(如此处所述)。 简而言之:依次处理第二个矩形的每条边, 并删除在该边定义的“外”半平面上的所有部分, (向两个方向延伸)从候选交集多边形中移除。 对于所有边都这样做,留下候选交集多边形 仅包含第二个矩形内部或边界上的部分。
可以从顶点的坐标计算出结果多边形的面积, 通过对每条边的顶点进行叉积求和(再次按逆时针顺序), 并将其除以二。例如,请参见www.mathopenref.com/coordpolygonarea.html 足够的理论和解释。以下是代码:
- 找到相交的多边形(如果有); - 确定相交多边形的面积。
当您使用矩形的顶点(角落)时,这两个问题都相对容易。因此,首先必须确定这些顶点。假设坐标原点位于矩形的中心,顶点从左下角开始按逆时针方向排列:
(-w/2, -h/2)、(w/2, -h/2)、(w/2, h/2) 和 (-w/2, h/2)。
将其旋转角度a并将它们平移到矩形中心的正确位置,这些变成:
(cx + (-w/2)cos(a) - (-h/2)sin(a), cy + (-w/2)sin(a) + (-h/2)cos(a)),其他角落点也是类似的。一种简单的确定交集多边形的方法如下: 将一个矩形作为候选交集多边形。 然后应用顺序切割过程(如此处所述)。 简而言之:依次处理第二个矩形的每条边, 并删除在该边定义的“外”半平面上的所有部分, (向两个方向延伸)从候选交集多边形中移除。 对于所有边都这样做,留下候选交集多边形 仅包含第二个矩形内部或边界上的部分。
可以从顶点的坐标计算出结果多边形的面积, 通过对每条边的顶点进行叉积求和(再次按逆时针顺序), 并将其除以二。例如,请参见www.mathopenref.com/coordpolygonarea.html 足够的理论和解释。以下是代码:
from math import pi, cos, sin
class Vector:
def __init__(self, x, y):
self.x = x
self.y = y
def __add__(self, v):
if not isinstance(v, Vector):
return NotImplemented
return Vector(self.x + v.x, self.y + v.y)
def __sub__(self, v):
if not isinstance(v, Vector):
return NotImplemented
return Vector(self.x - v.x, self.y - v.y)
def cross(self, v):
if not isinstance(v, Vector):
return NotImplemented
return self.x*v.y - self.y*v.x
class Line:
# ax + by + c = 0
def __init__(self, v1, v2):
self.a = v2.y - v1.y
self.b = v1.x - v2.x
self.c = v2.cross(v1)
def __call__(self, p):
return self.a*p.x + self.b*p.y + self.c
def intersection(self, other):
# See e.g. https://en.wikipedia.org/wiki/Line%E2%80%93line_intersection#Using_homogeneous_coordinates
if not isinstance(other, Line):
return NotImplemented
w = self.a*other.b - self.b*other.a
return Vector(
(self.b*other.c - self.c*other.b)/w,
(self.c*other.a - self.a*other.c)/w
)
def rectangle_vertices(cx, cy, w, h, r):
angle = pi*r/180
dx = w/2
dy = h/2
dxcos = dx*cos(angle)
dxsin = dx*sin(angle)
dycos = dy*cos(angle)
dysin = dy*sin(angle)
return (
Vector(cx, cy) + Vector(-dxcos - -dysin, -dxsin + -dycos),
Vector(cx, cy) + Vector( dxcos - -dysin, dxsin + -dycos),
Vector(cx, cy) + Vector( dxcos - dysin, dxsin + dycos),
Vector(cx, cy) + Vector(-dxcos - dysin, -dxsin + dycos)
)
def intersection_area(r1, r2):
# r1 and r2 are in (center, width, height, rotation) representation
# First convert these into a sequence of vertices
rect1 = rectangle_vertices(*r1)
rect2 = rectangle_vertices(*r2)
# Use the vertices of the first rectangle as
# starting vertices of the intersection polygon.
intersection = rect1
# Loop over the edges of the second rectangle
for p, q in zip(rect2, rect2[1:] + rect2[:1]):
if len(intersection) <= 2:
break # No intersection
line = Line(p, q)
# Any point p with line(p) <= 0 is on the "inside" (or on the boundary),
# any point p with line(p) > 0 is on the "outside".
# Loop over the edges of the intersection polygon,
# and determine which part is inside and which is outside.
new_intersection = []
line_values = [line(t) for t in intersection]
for s, t, s_value, t_value in zip(
intersection, intersection[1:] + intersection[:1],
line_values, line_values[1:] + line_values[:1]):
if s_value <= 0:
new_intersection.append(s)
if s_value * t_value < 0:
# Points are on opposite sides.
# Add the intersection of the lines to new_intersection.
intersection_point = line.intersection(Line(s, t))
new_intersection.append(intersection_point)
intersection = new_intersection
# Calculate area
if len(intersection) <= 2:
return 0
return 0.5 * sum(p.x*q.y - p.y*q.x for p, q in
zip(intersection, intersection[1:] + intersection[:1]))
if __name__ == '__main__':
r1 = (10, 15, 15, 10, 30)
r2 = (15, 15, 20, 10, 0)
print(intersection_area(r1, r2))
- Ruud de Jong
3
顺便提一下,在你的回答中应该注意到它适用于计算任何多边形与任何凸多边形的交集。 - Leon
谢谢您的回答,非常清晰和有用!
Line.__call__() 中发生的操作是否有数学名称?它似乎与这个有关?https://math.stackexchange.com/questions/274712/calculate-on-which-side-of-a-straight-line-is-a-given-point-located - dgoldman3
intersection, pnt = contourIntersection(rect1, rect2)
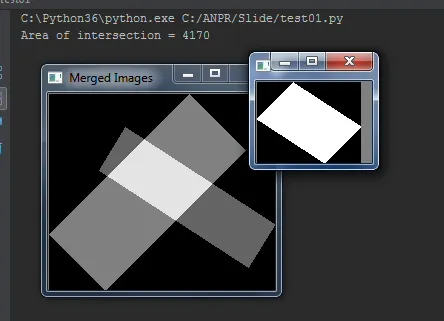
在查看了这个问题可能的重复页面后,我没有找到一个完整的Python解决方案,所以这里是我的解决方案,使用遮罩。这个函数可以处理任何角度上的复杂形状,而不仅仅是矩形。
您将旋转矩形的2个轮廓作为参数传入,如果没有交集,则返回“None”,否则返回相交区域的图像以及该图像相对于原始图像轮廓位置的左/上位置。
使用Python、CV2和NumPy。
import cv2
import math
import numpy as np
def contourIntersection(con1, con2, showContours=False):
# skip if no bounding rect intersection
leftmost1 = tuple(con1[con1[:, :, 0].argmin()][0])
topmost1 = tuple(con1[con1[:, :, 1].argmin()][0])
leftmost2 = tuple(con2[con2[:, :, 0].argmin()][0])
topmost2 = tuple(con2[con2[:, :, 1].argmin()][0])
rightmost1 = tuple(con1[con1[:, :, 0].argmax()][0])
bottommost1 = tuple(con1[con1[:, :, 1].argmax()][0])
rightmost2 = tuple(con2[con2[:, :, 0].argmax()][0])
bottommost2 = tuple(con2[con2[:, :, 1].argmax()][0])
if rightmost1[0] < leftmost2[0] or rightmost2[0] < leftmost1[0] or bottommost1[1] < topmost2[1] or bottommost2[1] < topmost1[1]:
return None, None
# reset top / left to 0
left = leftmost1[0] if leftmost1[0] < leftmost2[0] else leftmost2[0]
top = topmost1[1] if topmost1[1] < topmost2[1] else topmost2[1]
newCon1 = []
for pnt in con1:
newLeft = pnt[0][0] - left
newTop = pnt[0][1] - top
newCon1.append([newLeft, newTop])
# next
con1_new = np.array([newCon1], dtype=np.int32)
newCon2 = []
for pnt in con2:
newLeft = pnt[0][0] - left
newTop = pnt[0][1] - top
newCon2.append([newLeft, newTop])
# next
con2_new = np.array([newCon2], dtype=np.int32)
# width / height
right1 = rightmost1[0] - left
bottom1 = bottommost1[1] - top
right2 = rightmost2[0] - left
bottom2 = bottommost2[1] - top
width = right1 if right1 > right2 else right2
height = bottom1 if bottom1 > bottom2 else bottom2
# create images
img1 = np.zeros([height, width], np.uint8)
cv2.drawContours(img1, con1_new, -1, (255, 255, 255), -1)
img2 = np.zeros([height, width], np.uint8)
cv2.drawContours(img2, con2_new, -1, (255, 255, 255), -1)
# mask images together using AND
imgIntersection = cv2.bitwise_and(img1, img2)
if showContours:
img1[img1 > 254] = 128
img2[img2 > 254] = 100
imgAll = cv2.bitwise_or(img1, img2)
cv2.imshow('Merged Images', imgAll)
# end if
if not imgIntersection.sum():
return None, None
# trim
while not imgIntersection[0].sum():
imgIntersection = np.delete(imgIntersection, (0), axis=0)
top += 1
while not imgIntersection[-1].sum():
imgIntersection = np.delete(imgIntersection, (-1), axis=0)
while not imgIntersection[:, 0].sum():
imgIntersection = np.delete(imgIntersection, (0), axis=1)
left += 1
while not imgIntersection[:, -1].sum():
imgIntersection = np.delete(imgIntersection, (-1), axis=1)
return imgIntersection, (left, top)
# end function
为了完成答案,以便您可以使用上述函数与2个旋转矩形的CenterX、CenterY、Width、Height和Angle值,我添加了以下功能。只需要简单地更改代码底部的Rect1和Rect2属性即可适用于您自己的情况。
def pixelsBetweenPoints(xy1, xy2):
X = abs(xy1[0] - xy2[0])
Y = abs(xy1[1] - xy2[1])
return int(math.sqrt((X ** 2) + (Y ** 2)))
# end function
def rotatePoint(angle, centerPoint, dist):
xRatio = math.cos(math.radians(angle))
yRatio = math.sin(math.radians(angle))
xPotted = int(centerPoint[0] + (dist * xRatio))
yPlotted = int(centerPoint[1] + (dist * yRatio))
newPoint = [xPotted, yPlotted]
return newPoint
# end function
def angleBetweenPoints(pnt1, pnt2):
A_B = pixelsBetweenPoints(pnt1, pnt2)
pnt3 = (pnt1[0] + A_B, pnt1[1])
C = pixelsBetweenPoints(pnt2, pnt3)
angle = math.degrees(math.acos((A_B * A_B + A_B * A_B - C * C) / (2.0 * A_B * A_B)))
# reverse if above horizon
if pnt2[1] < pnt1[1]:
angle = angle * -1
# end if
return angle
# end function
def rotateRectContour(xCenter, yCenter, height, width, angle):
# calc positions
top = int(yCenter - (height / 2))
left = int(xCenter - (width / 2))
right = left + width
rightTop = (right, top)
centerPoint = (xCenter, yCenter)
# new right / top point
rectAngle = angleBetweenPoints(centerPoint, rightTop)
angleRightTop = angle + rectAngle
angleRightBottom = angle + 180 - rectAngle
angleLeftBottom = angle + 180 + rectAngle
angleLeftTop = angle - rectAngle
distance = pixelsBetweenPoints(centerPoint, rightTop)
rightTop_new = rotatePoint(angleRightTop, centerPoint, distance)
rightBottom_new = rotatePoint(angleRightBottom, centerPoint, distance)
leftBottom_new = rotatePoint(angleLeftBottom, centerPoint, distance)
leftTop_new = rotatePoint(angleLeftTop, centerPoint, distance)
contourList = [[leftTop_new], [rightTop_new], [rightBottom_new], [leftBottom_new]]
contour = np.array(contourList, dtype=np.int32)
return contour
# end function
# rect1
xCenter_1 = 40
yCenter_1 = 20
height_1 = 200
width_1 = 80
angle_1 = 45
rect1 = rotateRectContour(xCenter_1, yCenter_1, height_1, width_1, angle_1)
# rect2
xCenter_2 = 80
yCenter_2 = 25
height_2 = 180
width_2 = 50
angle_2 = 123
rect2 = rotateRectContour(xCenter_2, yCenter_2, height_2, width_2, angle_2)
intersection, pnt = contourIntersection(rect1, rect2, True)
if intersection is None:
print('No intersection')
else:
print('Area of intersection = ' + str(int(intersection.sum() / 255)))
cv2.imshow('Intersection', intersection)
# end if
cv2.waitKey(0)
- Bug
3
正在尝试计算值而不是形状。同时,考虑到轮廓可能是从图像中提取的,因此返回了一个结果,允许将其映射到交叉像素的个别交点。只有一行代码可以将图像转换为多边形,不想使代码混乱。 - Bug
在上述代码中使用time.time()进行运行时间测试并关闭所有输出屏幕,它的运行时间比time.time()能记录的最小时间还要短。如果没有可能发生交集时,还可以避免不必要的处理。 - Bug
网页内容由stack overflow 提供, 点击上面的可以查看英文原文,
原文链接
原文链接