我可以从我的Android设备上读取一个线性加速度值数组(在设备的坐标系中)和一个绝对方向值数组(在地球的坐标系中)。 我需要的是在后者的坐标系中获得线性加速度值。
我该如何转换它们呢?
编辑 在Ali的评论回复后:
好的,如果我理解正确,当我测量线性加速度时,手机的位置完全不重要,因为读数是在地球的坐标系中给出的。 对吗?
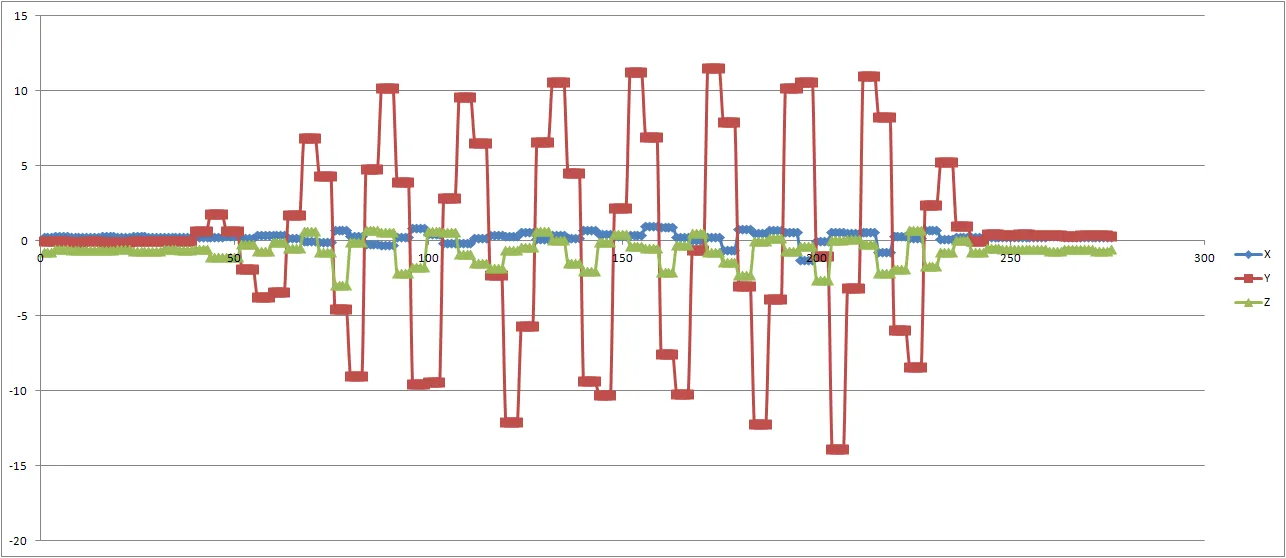
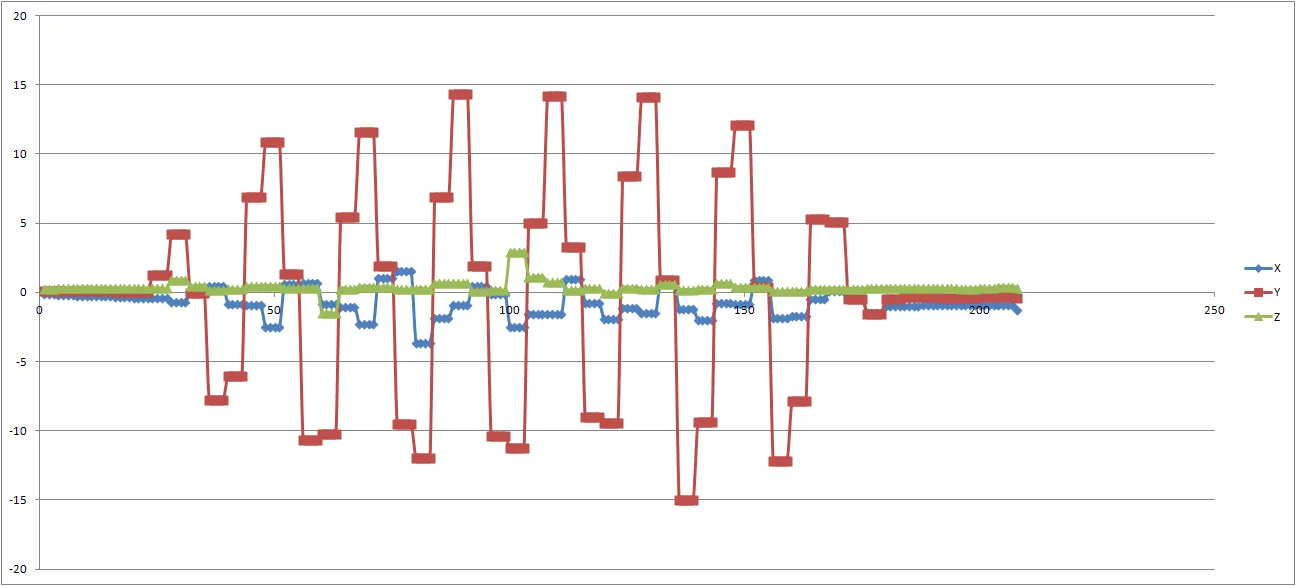
但我刚刚进行了一项测试,将手机放在不同的位置,并获得了不同轴的加速度。 这里有3对图片 - 第一张显示我放置设备的方式(抱歉我的“画家技能”),第二张显示直线加速度传感器提供的数据读数:
- 将设备放在左侧
- 设备仰卧
- 设备直立
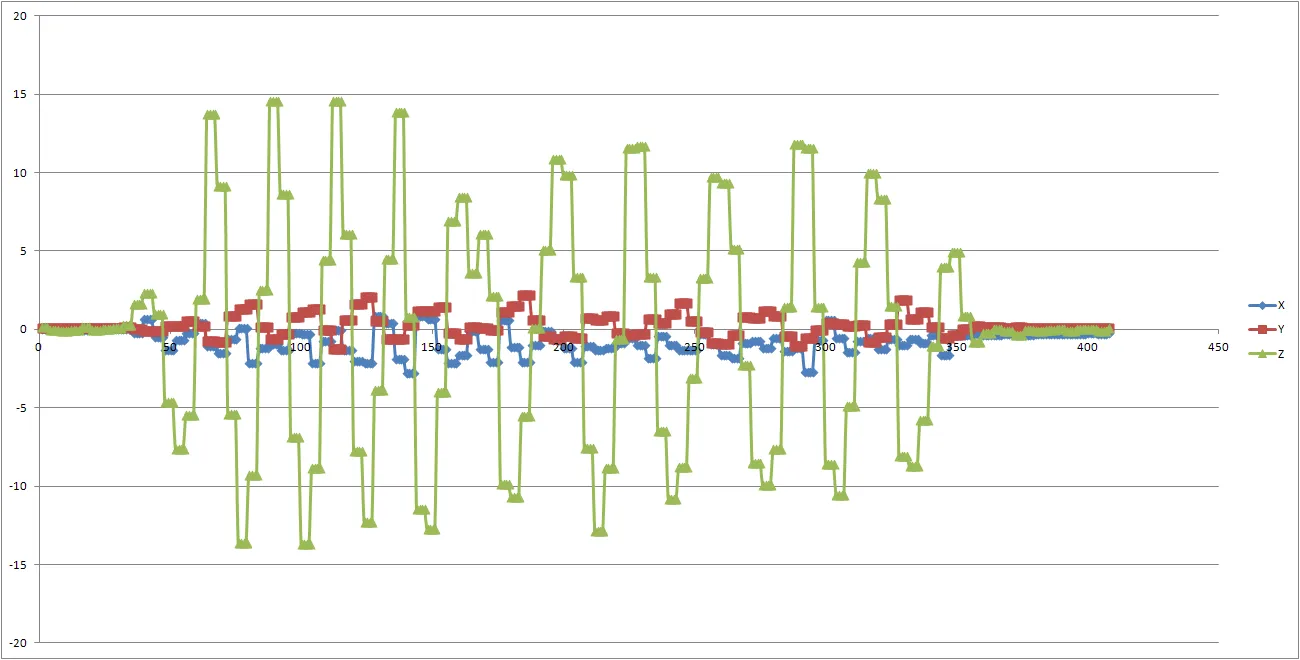
现在 - 为什么在第三种情况下,加速度沿Z轴发生(而不是Y),因为设备位置无关紧要?