我曾经也面临同样的问题,后来找到了这个用 Python 写的
解决方案。我尝试将代码转换成 Objective-C 并使用同样的测试数据,在结果准确性上没有问题。我修改了代码以便接受 2 维向量作为输入。
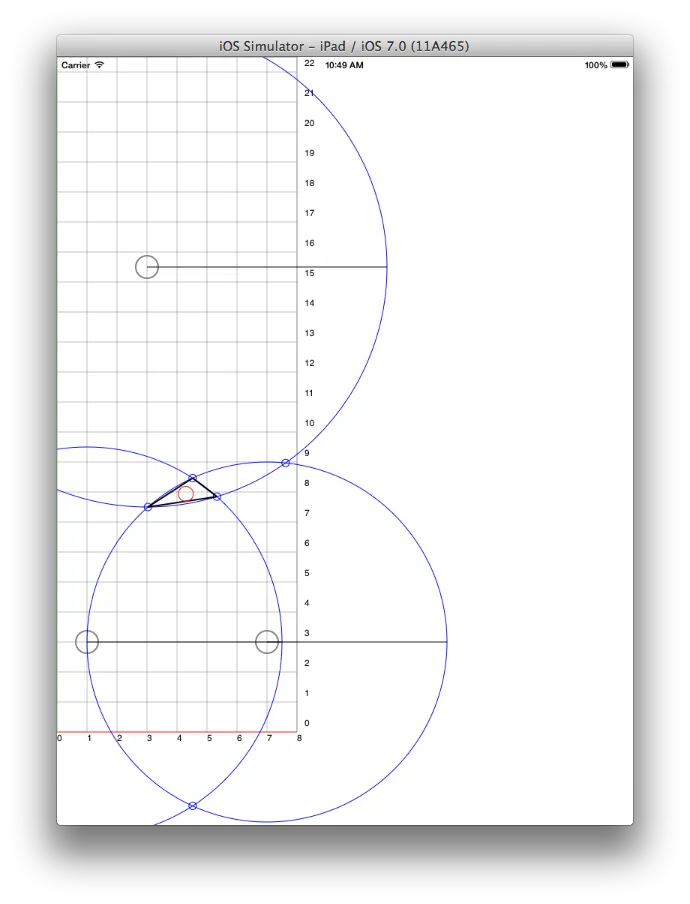
测试数据是:
P1 = (3,0) r1 = 6.4031
P2 = (9,0) r2 = 4.1231
P3 = (4,8) r3 = 5.6568
我将这些数据输入到代码中:
NSMutableArray *P1 = [[NSMutableArray alloc] initWithCapacity:0];
[P1 addObject:[NSNumber numberWithDouble:3]];
[P1 addObject:[NSNumber numberWithDouble:0]];
NSMutableArray *P2 = [[NSMutableArray alloc] initWithCapacity:0];
[P2 addObject:[NSNumber numberWithDouble:9]];
[P2 addObject:[NSNumber numberWithDouble:0]];
NSMutableArray *P3 = [[NSMutableArray alloc] initWithCapacity:0];
[P3 addObject:[NSNumber numberWithDouble:4]];
[P3 addObject:[NSNumber numberWithDouble:8]];
double DistA = 6.4031;
double DistB = 4.1231;
double DistC = 5.6568;
NSMutableArray *ex = [[NSMutableArray alloc] initWithCapacity:0];
double temp = 0;
for (int i = 0; i < [P1 count]; i++) {
double t1 = [[P2 objectAtIndex:i] doubleValue];
double t2 = [[P1 objectAtIndex:i] doubleValue];
double t = t1 - t2;
temp += (t*t);
}
for (int i = 0; i < [P1 count]; i++) {
double t1 = [[P2 objectAtIndex:i] doubleValue];
double t2 = [[P1 objectAtIndex:i] doubleValue];
double exx = (t1 - t2)/sqrt(temp);
[ex addObject:[NSNumber numberWithDouble:exx]];
}
NSMutableArray *p3p1 = [[NSMutableArray alloc] initWithCapacity:0];
for (int i = 0; i < [P3 count]; i++) {
double t1 = [[P3 objectAtIndex:i] doubleValue];
double t2 = [[P1 objectAtIndex:i] doubleValue];
double t3 = t1 - t2;
[p3p1 addObject:[NSNumber numberWithDouble:t3]];
}
double ival = 0;
for (int i = 0; i < [ex count]; i++) {
double t1 = [[ex objectAtIndex:i] doubleValue];
double t2 = [[p3p1 objectAtIndex:i] doubleValue];
ival += (t1*t2);
}
NSMutableArray *ey = [[NSMutableArray alloc] initWithCapacity:0];
double p3p1i = 0;
for (int i = 0; i < [P3 count]; i++) {
double t1 = [[P3 objectAtIndex:i] doubleValue];
double t2 = [[P1 objectAtIndex:i] doubleValue];
double t3 = [[ex objectAtIndex:i] doubleValue] * ival;
double t = t1 - t2 -t3;
p3p1i += (t*t);
}
for (int i = 0; i < [P3 count]; i++) {
double t1 = [[P3 objectAtIndex:i] doubleValue];
double t2 = [[P1 objectAtIndex:i] doubleValue];
double t3 = [[ex objectAtIndex:i] doubleValue] * ival;
double eyy = (t1 - t2 - t3)/sqrt(p3p1i);
[ey addObject:[NSNumber numberWithDouble:eyy]];
}
NSMutableArray *ez = [[NSMutableArray alloc] initWithCapacity:0];
double ezx;
double ezy;
double ezz;
if ([P1 count] !=3){
ezx = 0;
ezy = 0;
ezz = 0;
}else{
ezx = ([[ex objectAtIndex:1] doubleValue]*[[ey objectAtIndex:2]doubleValue]) - ([[ex objectAtIndex:2]doubleValue]*[[ey objectAtIndex:1]doubleValue]);
ezy = ([[ex objectAtIndex:2] doubleValue]*[[ey objectAtIndex:0]doubleValue]) - ([[ex objectAtIndex:0]doubleValue]*[[ey objectAtIndex:2]doubleValue]);
ezz = ([[ex objectAtIndex:0] doubleValue]*[[ey objectAtIndex:1]doubleValue]) - ([[ex objectAtIndex:1]doubleValue]*[[ey objectAtIndex:0]doubleValue]);
}
[ez addObject:[NSNumber numberWithDouble:ezx]];
[ez addObject:[NSNumber numberWithDouble:ezy]];
[ez addObject:[NSNumber numberWithDouble:ezz]];
double d = sqrt(temp);
double jval = 0;
for (int i = 0; i < [ey count]; i++) {
double t1 = [[ey objectAtIndex:i] doubleValue];
double t2 = [[p3p1 objectAtIndex:i] doubleValue];
jval += (t1*t2);
}
double xval = (pow(DistA,2) - pow(DistB,2) + pow(d,2))/(2*d);
double yval = ((pow(DistA,2) - pow(DistC,2) + pow(ival,2) + pow(jval,2))/(2*jval)) - ((ival/jval)*xval);
double zval;
if ([P1 count] !=3){
zval = 0;
}else{
zval = sqrt(pow(DistA,2) - pow(xval,2) - pow(yval,2));
}
NSMutableArray *triPt = [[NSMutableArray alloc] initWithCapacity:0];
for (int i = 0; i < [P1 count]; i++) {
double t1 = [[P1 objectAtIndex:i] doubleValue];
double t2 = [[ex objectAtIndex:i] doubleValue] * xval;
double t3 = [[ey objectAtIndex:i] doubleValue] * yval;
double t4 = [[ez objectAtIndex:i] doubleValue] * zval;
double triptx = t1+t2+t3+t4;
[triPt addObject:[NSNumber numberWithDouble:triptx]];
}
NSLog(@"ex %@",ex);
NSLog(@"i %f",ival);
NSLog(@"ey %@",ey);
NSLog(@"d %f",d);
NSLog(@"j %f",jval);
NSLog(@"x %f",xval);
NSLog(@"y %f",yval);
NSLog(@"y %f",yval);
NSLog(@"final result %@",triPt);
我使用上述的测试数据在笛卡尔图中绘制了图形,得到了未知点位于(8,4)的结果。之后,我使用上面的代码进行测试,结果为(7.999978,4.000021710625001)。
接下来,我使用以下数据进行了第二次测试:
P1 = (2,0) r1 = 5.831
P2 = (8,0) r2 = 5.831
P3 = (8,10) r3 = 5.831
手动计算结果为(5,5),使用代码计算的结果也是(5,5)。因此,我认为这段代码是正确的。
{kind=link}