我会选择一个简单的离散方法。环形区域的隐式公式是微不足道的,如果环形区域的数量很多,则可以使用基于扫描线的方法相对高效地计算它们的交集。
为了在快速计算中获得高精度,一种选择可能是使用多分辨率方法(即首先从低分辨率开始,然后仅重新计算靠近有效点的高分辨率样本)。
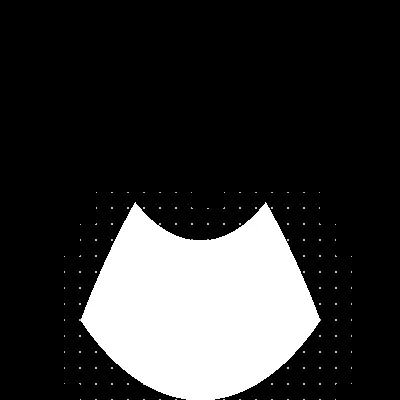
我写的一个小型Python程序可以在约0.5秒内生成一个400x400像素的交集区域图像(如果使用C进行计算,则可以获得100倍的加速)。
data = [(2.0, 2.0, 0.5, 1.0),
(1.0, 2.0, 0.3, 1.0),
(1.5, 1.0, 0.3, 0.5)]
x0 = max(x - r1 for x, y, r0, r1 in data)
y0 = max(y - r1 for x, y, r0, r1 in data)
x1 = min(x + r1 for x, y, r0, r1 in data)
y1 = min(y + r1 for x, y, r0, r1 in data)
def hit(x, y):
for cx, cy, r0, r1 in data:
if not (r0**2 <= ((x - cx)**2 + (y - cy)**2) <= r1**2):
return False
return True
res = 400
step = 16
white = chr(255)
grey = chr(192)
black = chr(0)
img = [black] * (res * res)
cells = {}
for i in xrange(0, res, step):
y = y0 + i * (y1 - y0) / res
for j in xrange(0, res, step):
x = x0 + j * (x1 - x0) / res
if hit(x, y):
for h in xrange(-step*2, step*3, step):
for v in xrange(-step*2, step*3, step):
cells[(i+v, j+h)] = True
for i in xrange(0, res, step):
for j in xrange(0, res, step):
if cells.get((i, j), False):
img[i * res + j] = grey
img[(i + step - 1) * res + j] = grey
img[(i + step - 1) * res + (j + step - 1)] = grey
img[i * res + (j + step - 1)] = grey
for v in xrange(step):
y = y0 + (i + v) * (y1 - y0) / res
for h in xrange(step):
x = x0 + (j + h) * (x1 - x0) / res
if hit(x, y):
img[(i + v)*res + (j + h)] = white
open("result.pgm", "wb").write(("P5\n%i %i 255\n" % (res, res)) +
"".join(img))
另一个有趣的选择可能是使用GPU(图形处理器),如果可用的话。从白色图片开始,用黑色绘制每个环状物的外部,最终留下的交集区域将是白色的。
例如,使用Python/Qt进行此计算的代码非常简单:
img = QImage(res, res, QImage.Format_RGB32)
dc = QPainter(img)
dc.fillRect(0, 0, res, res, QBrush(QColor(255, 255, 255)))
dc.setPen(Qt.NoPen)
dc.setBrush(QBrush(QColor(0, 0, 0)))
for x, y, r0, r1 in data:
xa1 = (x - r1 - x0) * res / (x1 - x0)
xb1 = (x + r1 - x0) * res / (x1 - x0)
ya1 = (y - r1 - y0) * res / (y1 - y0)
yb1 = (y + r1 - y0) * res / (y1 - y0)
xa0 = (x - r0 - x0) * res / (x1 - x0)
xb0 = (x + r0 - x0) * res / (x1 - x0)
ya0 = (y - r0 - y0) * res / (y1 - y0)
yb0 = (y + r0 - y0) * res / (y1 - y0)
p = QPainterPath()
p.addEllipse(QRectF(xa0, ya0, xb0-xa0, yb0-ya0))
p.addEllipse(QRectF(xa1, ya1, xb1-xa1, yb1-ya1))
p.addRect(QRectF(0, 0, res, res))
dc.drawPath(p)
对于800x800分辨率的图像,计算部分大约需要8ms(我不确定它是否是硬件加速的)。
如果仅需要计算交点的重心,则根本不需要进行内存分配。例如,“暴力法”只需要几行C代码。
typedef struct TReading {
double x, y, r0, r1;
} Reading;
int hit(double xx, double yy,
Reading *readings, int num_readings)
{
while (num_readings--)
{
double dx = xx - readings->x;
double dy = yy - readings->y;
double d2 = dx*dx + dy*dy;
if (d2 < readings->r0 * readings->r0) return 0;
if (d2 > readings->r1 * readings->r1) return 0;
readings++;
}
return 1;
}
int computeLocation(Reading *readings, int num_readings,
int resolution,
double *result_x, double *result_y)
{
double x0 = -1E20, y0 = -1E20, x1 = 1E20, y1 = 1E20;
for (int i=0; i<num_readings; i++)
{
if (readings[i].x - readings[i].r1 > x0)
x0 = readings[i].x - readings[i].r1;
if (readings[i].y - readings[i].r1 > y0)
y0 = readings[i].y - readings[i].r1;
if (readings[i].x + readings[i].r1 < x1)
x1 = readings[i].x + readings[i].r1;
if (readings[i].y + readings[i].r1 < y1)
y1 = readings[i].y + readings[i].r1;
}
double ax = 0, ay = 0;
int total = 0;
for (int i=0; i<=resolution; i++)
{
double yy = y0 + i * (y1 - y0) / resolution;
for (int j=0; j<=resolution; j++)
{
double xx = x0 + j * (x1 - x0) / resolution;
if (hit(xx, yy, readings, num_readings))
{
ax += xx; ay += yy; total += 1;
}
}
}
if (total)
{
*result_x = ax / total;
*result_y = ay / total;
}
return total;
}
在我的电脑上,可以使用resolution = 100在0.08毫秒内计算重心(x=1.50000,y=1.383250),或者使用resolution = 400在1.3毫秒内计算(x=1.500000,y=1.383308)。当然,即使是仅针对重心版本,也可以实现双倍速度提升。
{kind=link}