我想用LSTM单元建模RNN,以便基于多个输入时间序列预测多个输出时间序列。具体而言,我有4个输出时间序列y1[t]、y2[t]、y3[t]、y4[t],每个长度为3,000(t=0,...,2999)。我还有3个输入时间序列x1[t]、x2[t]、x3[t],每个长度为3,000秒(t=0,...,2999)。目标是使用截至当前时间点的所有输入时间序列来预测y1[t]、.. y4[t]。
y1[t] = f1(x1[k],x2[k],x3[k], k = 0,...,t)
y2[t] = f2(x1[k],x2[k],x3[k], k = 0,...,t)
y3[t] = f3(x1[k],x2[k],x3[k], k = 0,...,t)
y4[t] = f3(x1[k],x2[k],x3[k], k = 0,...,t)
为了使模型具有长期内存,我按照 keras-stateful-lstm的方法创建了一个有状态的RNN模型。 我的情况与 keras-stateful-lstm 的区别在于:
- 有多个输出时间序列
- 有多个输入时间序列
- 目标是预测连续时间序列
我的代码正在运行。 但是,即使使用简单数据,模型的预测结果也很差。 因此,我想请问您是否有任何错误。
以下是我的示例代码。
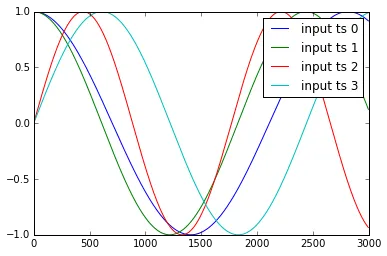
在玩具示例中,我们的输入时间序列是简单的余弦和正弦波:
import numpy as np
def random_sample(len_timeseries=3000):
Nchoice = 600
x1 = np.cos(np.arange(0,len_timeseries)/float(1.0 + np.random.choice(Nchoice)))
x2 = np.cos(np.arange(0,len_timeseries)/float(1.0 + np.random.choice(Nchoice)))
x3 = np.sin(np.arange(0,len_timeseries)/float(1.0 + np.random.choice(Nchoice)))
x4 = np.sin(np.arange(0,len_timeseries)/float(1.0 + np.random.choice(Nchoice)))
y1 = np.random.random(len_timeseries)
y2 = np.random.random(len_timeseries)
y3 = np.random.random(len_timeseries)
for t in range(3,len_timeseries):
## the output time series depend on input as follows:
y1[t] = x1[t-2]
y2[t] = x2[t-1]*x3[t-2]
y3[t] = x4[t-3]
y = np.array([y1,y2,y3]).T
X = np.array([x1,x2,x3,x4]).T
return y, X
def generate_data(Nsequence = 1000):
X_train = []
y_train = []
for isequence in range(Nsequence):
y, X = random_sample()
X_train.append(X)
y_train.append(y)
return np.array(X_train),np.array(y_train)
请注意,在时间点t,y1的值只是x1在t-2时刻的值。 同时,请注意,在时间点t,y3的值只是x1在前两个时刻的值。
使用这些函数,我生成了100组时间序列y1、y2、y3、x1、x2、x3、x4。其中一半用于训练数据,另一半用于测试数据。
Nsequence = 100
prop = 0.5
Ntrain = Nsequence*prop
X, y = generate_data(Nsequence)
X_train = X[:Ntrain,:,:]
X_test = X[Ntrain:,:,:]
y_train = y[:Ntrain,:,:]
y_test = y[Ntrain:,:,:]
X和y都是三维的,每个包含:
#X.shape = (N sequence, length of time series, N input features)
#y.shape = (N sequence, length of time series, N targets)
print X.shape, y.shape
> (100, 3000, 4) (100, 3000, 3)
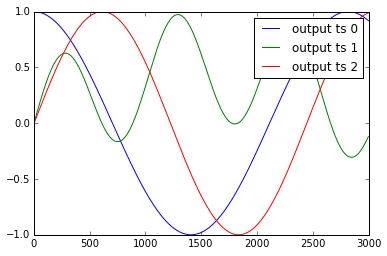
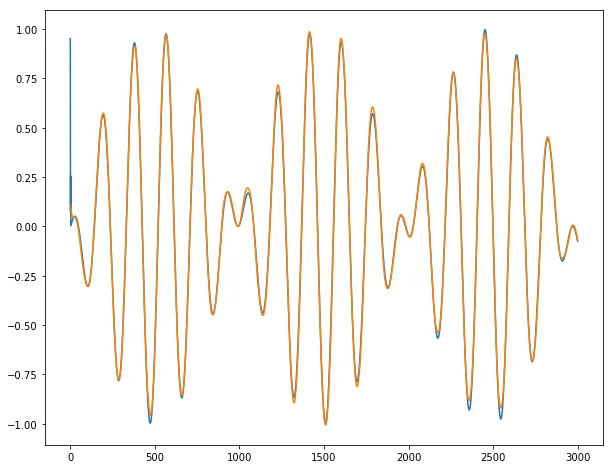
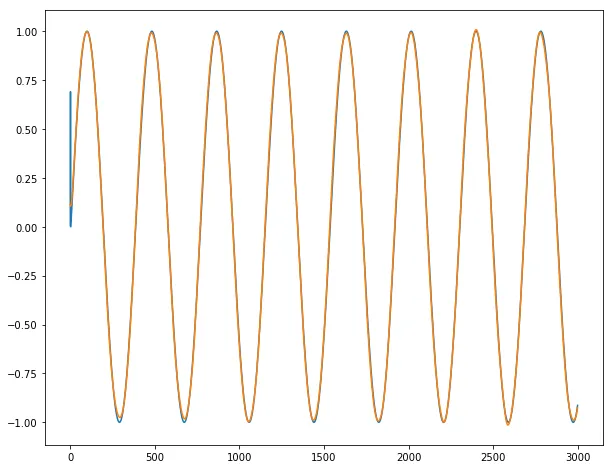
以下是时间序列y1,..y4和x1,..,x3的示例:
 我对这些数据进行了标准化处理:
我对这些数据进行了标准化处理:def standardize(X_train,stat=None):
## X_train is 3 dimentional e.g. (Nsample,len_timeseries, Nfeature)
## standardization is done with respect to the 3rd dimention
if stat is None:
featmean = np.array([np.nanmean(X_train[:,:,itrain]) for itrain in range(X_train.shape[2])]).reshape(1,1,X_train.shape[2])
featstd = np.array([np.nanstd(X_train[:,:,itrain]) for itrain in range(X_train.shape[2])]).reshape(1,1,X_train.shape[2])
stat = {"featmean":featmean,"featstd":featstd}
else:
featmean = stat["featmean"]
featstd = stat["featstd"]
X_train_s = (X_train - featmean)/featstd
return X_train_s, stat
X_train_s, X_stat = standardize(X_train,stat=None)
X_test_s, _ = standardize(X_test,stat=X_stat)
y_train_s, y_stat = standardize(y_train,stat=None)
y_test_s, _ = standardize(y_test,stat=y_stat)
创建一个有10个LSTM隐藏神经元的有状态RNN模型
from keras.models import Sequential
from keras.layers.core import Dense, Activation, Dropout
from keras.layers.recurrent import LSTM
def create_stateful_model(hidden_neurons):
# create and fit the LSTM network
model = Sequential()
model.add(LSTM(hidden_neurons,
batch_input_shape=(1, 1, X_train.shape[2]),
return_sequences=False,
stateful=True))
model.add(Dropout(0.5))
model.add(Dense(y_train.shape[2]))
model.add(Activation("linear"))
model.compile(loss='mean_squared_error', optimizer="rmsprop",metrics=['mean_squared_error'])
return model
model = create_stateful_model(10)
现在以下代码用于训练和验证RNN模型:
def get_R2(y_pred,y_test):
## y_pred_s_batch: (Nsample, len_timeseries, Noutput)
## the relative percentage error is computed for each output
overall_mean = np.nanmean(y_test)
SSres = np.nanmean( (y_pred - y_test)**2 ,axis=0).mean(axis=0)
SStot = np.nanmean( (y_test - overall_mean)**2 ,axis=0).mean(axis=0)
R2 = 1 - SSres / SStot
print "<R2 testing> target 1:",R2[0],"target 2:",R2[1],"target 3:",R2[2]
return R2
def reshape_batch_input(X_t,y_t=None):
X_t = np.array(X_t).reshape(1,1,len(X_t)) ## (1,1,4) dimention
if y_t is not None:
y_t = np.array([y_t]) ## (1,3)
return X_t,y_t
def fit_stateful(model,X_train,y_train,X_test,y_test,nb_epoch=8):
'''
reference: http://philipperemy.github.io/keras-stateful-lstm/
X_train: (N_time_series, len_time_series, N_features) = (10,000, 3,600 (max), 2),
y_train: (N_time_series, len_time_series, N_output) = (10,000, 3,600 (max), 4)
'''
max_len = X_train.shape[1]
print "X_train.shape(Nsequence =",X_train.shape[0],"len_timeseries =",X_train.shape[1],"Nfeats =",X_train.shape[2],")"
print "y_train.shape(Nsequence =",y_train.shape[0],"len_timeseries =",y_train.shape[1],"Ntargets =",y_train.shape[2],")"
print('Train...')
for epoch in range(nb_epoch):
print('___________________________________')
print "epoch", epoch+1, "out of ",nb_epoch
## ---------- ##
## training ##
## ---------- ##
mean_tr_acc = []
mean_tr_loss = []
for s in range(X_train.shape[0]):
for t in range(max_len):
X_st = X_train[s][t]
y_st = y_train[s][t]
if np.any(np.isnan(y_st)):
break
X_st,y_st = reshape_batch_input(X_st,y_st)
tr_loss, tr_acc = model.train_on_batch(X_st,y_st)
mean_tr_acc.append(tr_acc)
mean_tr_loss.append(tr_loss)
model.reset_states()
##print('accuracy training = {}'.format(np.mean(mean_tr_acc)))
print('<loss (mse) training> {}'.format(np.mean(mean_tr_loss)))
## ---------- ##
## testing ##
## ---------- ##
y_pred = predict_stateful(model,X_test)
eva = get_R2(y_pred,y_test)
return model, eva, y_pred
def predict_stateful(model,X_test):
y_pred = []
max_len = X_test.shape[1]
for s in range(X_test.shape[0]):
y_s_pred = []
for t in range(max_len):
X_st = X_test[s][t]
if np.any(np.isnan(X_st)):
## the rest of y is NA
y_s_pred.extend([np.NaN]*(max_len-len(y_s_pred)))
break
X_st,_ = reshape_batch_input(X_st)
y_st_pred = model.predict_on_batch(X_st)
y_s_pred.append(y_st_pred[0].tolist())
y_pred.append(y_s_pred)
model.reset_states()
y_pred = np.array(y_pred)
return y_pred
model, train_metric, y_pred = fit_stateful(model,
X_train_s,y_train_s,
X_test_s,y_test_s,nb_epoch=15)
输出结果如下:
X_train.shape(Nsequence = 15 len_timeseries = 3000 Nfeats = 4 )
y_train.shape(Nsequence = 15 len_timeseries = 3000 Ntargets = 3 )
Train...
___________________________________
epoch 1 out of 15
<loss (mse) training> 0.414115458727
<R2 testing> target 1: 0.664464304688 target 2: -0.574523052322 target 3: 0.526447813052
___________________________________
epoch 2 out of 15
<loss (mse) training> 0.394549429417
<R2 testing> target 1: 0.361516087033 target 2: -0.724583671831 target 3: 0.795566178787
___________________________________
epoch 3 out of 15
<loss (mse) training> 0.403199136257
<R2 testing> target 1: 0.09610702779 target 2: -0.468219774909 target 3: 0.69419269042
___________________________________
epoch 4 out of 15
<loss (mse) training> 0.406423777342
<R2 testing> target 1: 0.469149270848 target 2: -0.725592048946 target 3: 0.732963522766
___________________________________
epoch 5 out of 15
<loss (mse) training> 0.408153116703
<R2 testing> target 1: 0.400821776652 target 2: -0.329415365214 target 3: 0.2578432553
___________________________________
epoch 6 out of 15
<loss (mse) training> 0.421062678099
<R2 testing> target 1: -0.100464591586 target 2: -0.232403824523 target 3: 0.570606489959
___________________________________
epoch 7 out of 15
<loss (mse) training> 0.417774856091
<R2 testing> target 1: 0.320094445321 target 2: -0.606375769083 target 3: 0.349876223119
___________________________________
epoch 8 out of 15
<loss (mse) training> 0.427440851927
<R2 testing> target 1: 0.489543715713 target 2: -0.445328806611 target 3: 0.236463139804
___________________________________
epoch 9 out of 15
<loss (mse) training> 0.422931671143
<R2 testing> target 1: -0.31006468223 target 2: -0.322621276474 target 3: 0.122573123871
___________________________________
epoch 10 out of 15
<loss (mse) training> 0.43609803915
<R2 testing> target 1: 0.459111316554 target 2: -0.313382405804 target 3: 0.636854743292
___________________________________
epoch 11 out of 15
<loss (mse) training> 0.433844655752
<R2 testing> target 1: -0.0161015052703 target 2: -0.237462995323 target 3: 0.271788109459
___________________________________
epoch 12 out of 15
<loss (mse) training> 0.437297314405
<R2 testing> target 1: -0.493665758658 target 2: -0.234236263092 target 3: 0.047264439493
___________________________________
epoch 13 out of 15
<loss (mse) training> 0.470605045557
<R2 testing> target 1: 0.144443089961 target 2: -0.333210874982 target 3: -0.00432615142135
___________________________________
epoch 14 out of 15
<loss (mse) training> 0.444566756487
<R2 testing> target 1: -0.053982119103 target 2: -0.0676577449316 target 3: -0.12678037186
___________________________________
epoch 15 out of 15
<loss (mse) training> 0.482106208801
<R2 testing> target 1: 0.208482181828 target 2: -0.402982670798 target 3: 0.366757778713
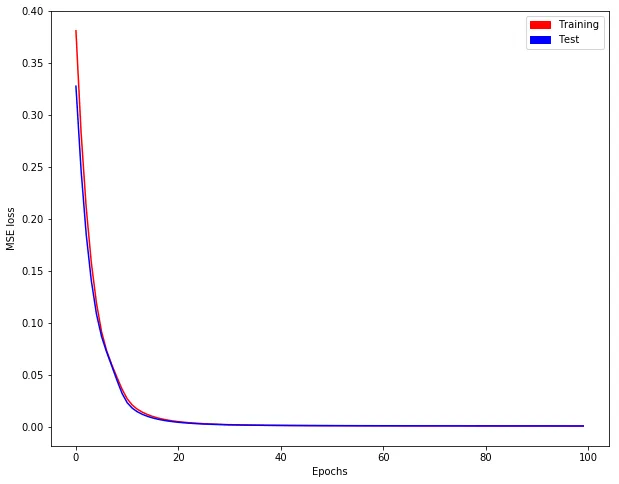
正如您所看到的,训练损失并没有减少!!
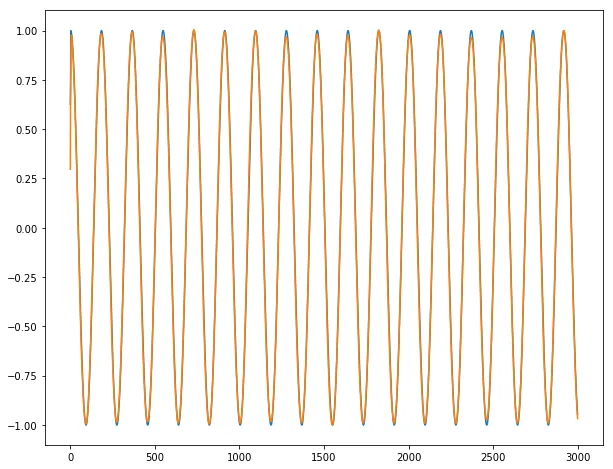
由于目标时间序列1和3与输入时间序列有非常简单的关系(y1[t] = x1[t-2],y3[t] = x4[t-3]),我预期会有完美的预测性能。然而,每个时期测试R2显示情况并非如此。最后一次时期的R2仅约为0.2和0.36。显然,算法没有收敛。我对这个结果感到非常困惑。请告诉我我错过了什么,以及为什么算法没有收敛。
hyperopt包或hyperas包装器进行一些超参数优化呢? - StatsSorceress