我是一个滑翔伞飞行员。滑翔伞比赛被定义为一组虚拟浮标。第一个飞越所有浮标的飞行员获胜。
一个浮标由两个参数定义:
- 一个点的坐标 - 一个半径
这在3D空间中定义了一个圆柱体,但为简单起见,让我们将问题保留在2D中。比赛可能看起来像这样(近似绘图):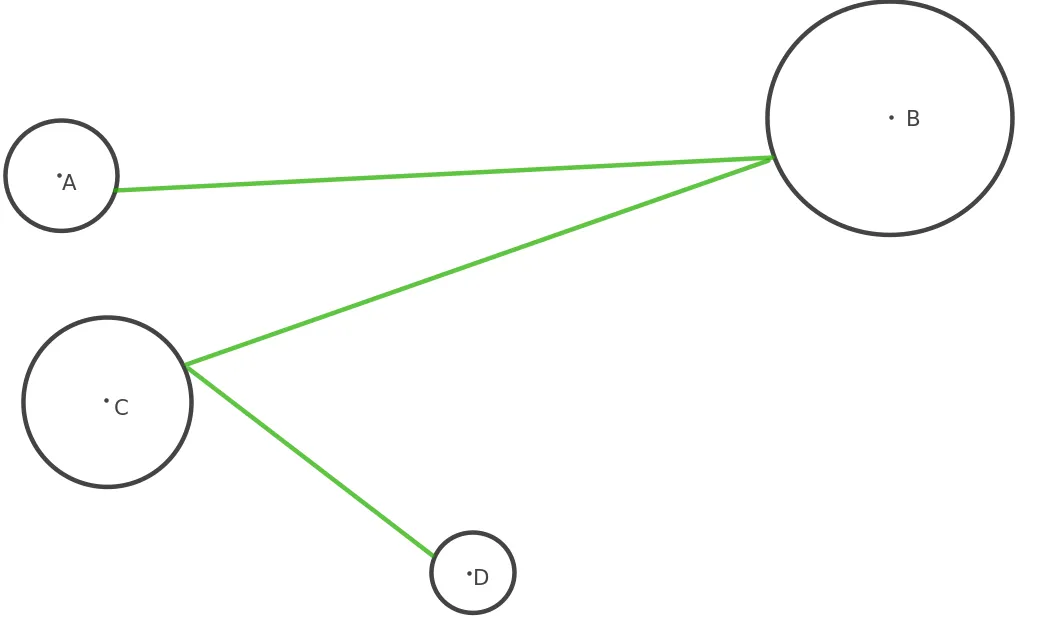 A=1000m; B=3000m; C=2000m; D=500m
A=1000m; B=3000m; C=2000m; D=500m
飞行员应该从圆A内开始,然后飞入圆B和C(或至少“触摸”它),并应该在圆D内结束。
如何计算最优(最短)路径?
结果应该是构成最短路径的所有线段的坐标。
一个浮标由两个参数定义:
- 一个点的坐标 - 一个半径
这在3D空间中定义了一个圆柱体,但为简单起见,让我们将问题保留在2D中。比赛可能看起来像这样(近似绘图):
A=1000m; B=3000m; C=2000m; D=500m飞行员应该从圆A内开始,然后飞入圆B和C(或至少“触摸”它),并应该在圆D内结束。
如何计算最优(最短)路径?
结果应该是构成最短路径的所有线段的坐标。