简而言之,本文末尾包含一个用于概念验证的JavaScript代码。
全景图像的标题和俯仰参数 h0 和 p0 对应于一个方向。通过使用相机的焦距 f 来缩放这个方向向量,可以得到视口中心在 (u0, v0) 处的 3D 坐标 (x0, y0, z0):
x0 = f * cos( p0 ) * sin( h0 )
y0 = f * cos( p0 ) * cos( h0 )
z0 = f * sin( p0 )
现在的目标是找到图像中某个给定像素坐标对应的点的三维坐标。首先,将这些像素坐标映射到相对于视口中心的像素偏移量(向右和向上)。
du = u - u0 = u - w / 2
dv = v0 - v = h / 2 - v
首先需要找到在3D中视口的本地二维正交基。单位向量(ux, uy, uz)沿着x轴(随着方位角的增加向右)支持图像,向量(vx, vy, vz)沿着y轴(随着俯仰角的增加向上)支持图像。一旦确定了这两个向量,视口中与(du, dv)像素偏移匹配的点的三维坐标就很简单了:
x = x0 + du * ux + dv * vx
y = y0 + du * uy + dv * vy
z = z0 + du * uz + dv * vz
这个点的标题和倾角参数h和p如下:
R = sqrt( x * x + y * y + z * z )
h = atan2( x, y )
p = asin( z / R )
最后,要得到两个单位向量
(ux, uy, uz) 和
(vx, vy, vz),需要在
(p0, h0) 处计算出仰角和方位角参数的偏导数,计算结果如下:
vx = -sin( p0 ) * sin ( h0 )
vy = -sin( p0 ) * cos ( h0 )
vz = cos( p0 )
ux = sgn( cos ( p0 ) ) * cos( h0 )
uy = -sgn( cos ( p0 ) ) * sin( h0 )
uz = 0
其中 sgn( a ) 在 a >= 0 时为 +1,否则为 -1。
补码:
The focal length is derived from the horizontal field of view and the width of the image:
f = (w / 2) / Math.tan(fov / 2)
The reverse mapping from heading and pitch parameters to pixel coordinates can be done similarly:
- Find the 3D coordinates
(x, y, z) of the direction of the ray corresponding to the specified heading and pitch parameters,
- Find the 3D coordinates
(x0, y0, z0) of the direction of the ray corresponding to the viewport center (an associated image plane is located at (x0, y0, z0) with an (x0, y0, z0) normal),
- Intersect the ray for the specified heading and pitch parameters with the image plane, this gives the 3D offset from the viewport center,
- Project this 3D offset on the local basis, getting the 2D offsets
du and dv
- Map
du and dv to absolute pixel coordinates.
In practice, this approach seems to work similarly well on both square and rectangular viewports.
概念验证代码(在包含带有“全景”ID的大小画布元素的网页上调用onLoad()函数)
'use strict';
var viewer;
function onClick(e) {
viewer.click(e);
}
function onLoad() {
var element = document.getElementById("panorama");
viewer = new PanoramaViewer(element);
viewer.update();
}
function PanoramaViewer(element) {
this.element = element;
this.width = element.width;
this.height = element.height;
this.pitch = 0;
this.heading = 0;
element.addEventListener("click", onClick, false);
}
PanoramaViewer.FOV = 90;
PanoramaViewer.prototype.makeUrl = function() {
var fov = PanoramaViewer.FOV;
return "https://maps.googleapis.com/maps/api/streetview?location=40.457375,-80.009353&size=" + this.width + "x" + this.height + "&fov=" + fov + "&heading=" + this.heading + "&pitch=" + this.pitch;
}
PanoramaViewer.prototype.update = function() {
var element = this.element;
element.style.backgroundImage = "url(" + this.makeUrl() + ")";
var width = this.width;
var height = this.height;
var context = element.getContext('2d');
context.strokeStyle = '#FFFF00';
context.beginPath();
context.moveTo(0, height / 2);
context.lineTo(width, height / 2);
context.stroke();
context.beginPath();
context.moveTo(width / 2, 0);
context.lineTo(width / 2, height);
context.stroke();
}
function sgn(x) {
return x >= 0 ? 1 : -1;
}
PanoramaViewer.prototype.unmap = function(heading, pitch) {
var PI = Math.PI
var cos = Math.cos;
var sin = Math.sin;
var tan = Math.tan;
var fov = PanoramaViewer.FOV * PI / 180.0;
var width = this.width;
var height = this.height;
var f = 0.5 * width / tan(0.5 * fov);
var h = heading * PI / 180.0;
var p = pitch * PI / 180.0;
var x = f * cos(p) * sin(h);
var y = f * cos(p) * cos(h);
var z = f * sin(p);
var h0 = this.heading * PI / 180.0;
var p0 = this.pitch * PI / 180.0;
var x0 = f * cos(p0) * sin(h0);
var y0 = f * cos(p0) * cos(h0);
var z0 = f * sin(p0);
var t = f * f / (x0 * x + y0 * y + z0 * z);
var ux = sgn(cos(p0)) * cos(h0);
var uy = -sgn(cos(p0)) * sin(h0);
var uz = 0;
var vx = -sin(p0) * sin(h0);
var vy = -sin(p0) * cos(h0);
var vz = cos(p0);
var x1 = t * x;
var y1 = t * y;
var z1 = t * z;
var dx10 = x1 - x0;
var dy10 = y1 - y0;
var dz10 = z1 - z0;
var du = ux * dx10 + uy * dy10 + uz * dz10;
var dv = vx * dx10 + vy * dy10 + vz * dz10;
return {
u: du + width / 2,
v: height / 2 - dv,
};
}
PanoramaViewer.prototype.map = function(u, v) {
var PI = Math.PI;
var cos = Math.cos;
var sin = Math.sin;
var tan = Math.tan;
var sqrt = Math.sqrt;
var atan2 = Math.atan2;
var asin = Math.asin;
var fov = PanoramaViewer.FOV * PI / 180.0;
var width = this.width;
var height = this.height;
var h0 = this.heading * PI / 180.0;
var p0 = this.pitch * PI / 180.0;
var f = 0.5 * width / tan(0.5 * fov);
var x0 = f * cos(p0) * sin(h0);
var y0 = f * cos(p0) * cos(h0);
var z0 = f * sin(p0);
var du = u - width / 2;
var dv = height / 2 - v;
var ux = sgn(cos(p0)) * cos(h0);
var uy = -sgn(cos(p0)) * sin(h0);
var uz = 0;
var vx = -sin(p0) * sin(h0);
var vy = -sin(p0) * cos(h0);
var vz = cos(p0);
var x = x0 + du * ux + dv * vx;
var y = y0 + du * uy + dv * vy;
var z = z0 + du * uz + dv * vz;
var R = sqrt(x * x + y * y + z * z);
var h = atan2(x, y);
var p = asin(z / R);
return {
heading: h * 180.0 / PI,
pitch: p * 180.0 / PI
};
}
PanoramaViewer.prototype.click = function(e) {
var rect = e.target.getBoundingClientRect();
var u = e.clientX - rect.left;
var v = e.clientY - rect.top;
var uvCoords = this.unmap(this.heading, this.pitch);
console.log("current viewport center");
console.log(" heading: " + this.heading);
console.log(" pitch: " + this.pitch);
console.log(" u: " + uvCoords.u)
console.log(" v: " + uvCoords.v);
var hpCoords = this.map(u, v);
uvCoords = this.unmap(hpCoords.heading, hpCoords.pitch);
console.log("click at (" + u + "," + v + ")");
console.log(" heading: " + hpCoords.heading);
console.log(" pitch: " + hpCoords.pitch);
console.log(" u: " + uvCoords.u);
console.log(" v: " + uvCoords.v);
this.heading = hpCoords.heading;
this.pitch = hpCoords.pitch;
this.update();
}

 当我加/减计算出的角度到实际角度时(根据左/右、上/下的情况),可以计算新的航向和俯仰角。请查看链接的JSFiddle以获得正确的行为。
当我加/减计算出的角度到实际角度时(根据左/右、上/下的情况),可以计算新的航向和俯仰角。请查看链接的JSFiddle以获得正确的行为。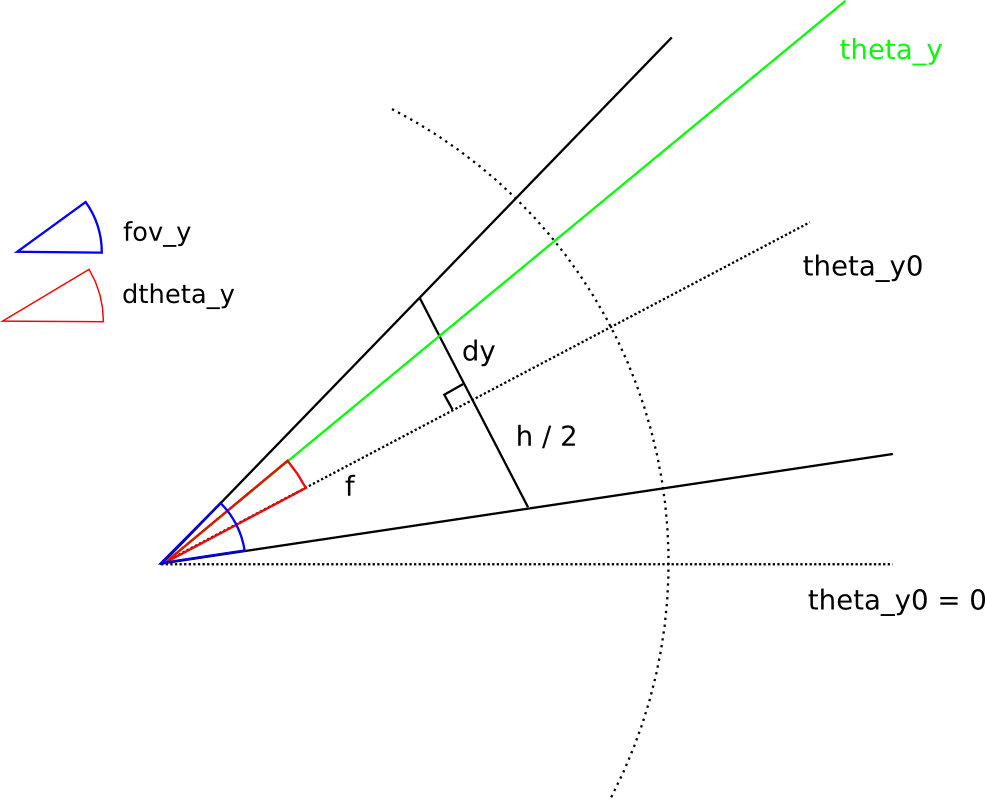
lengthOfChord == diameter(即180°角),它就会失效。 - Tyler Eich