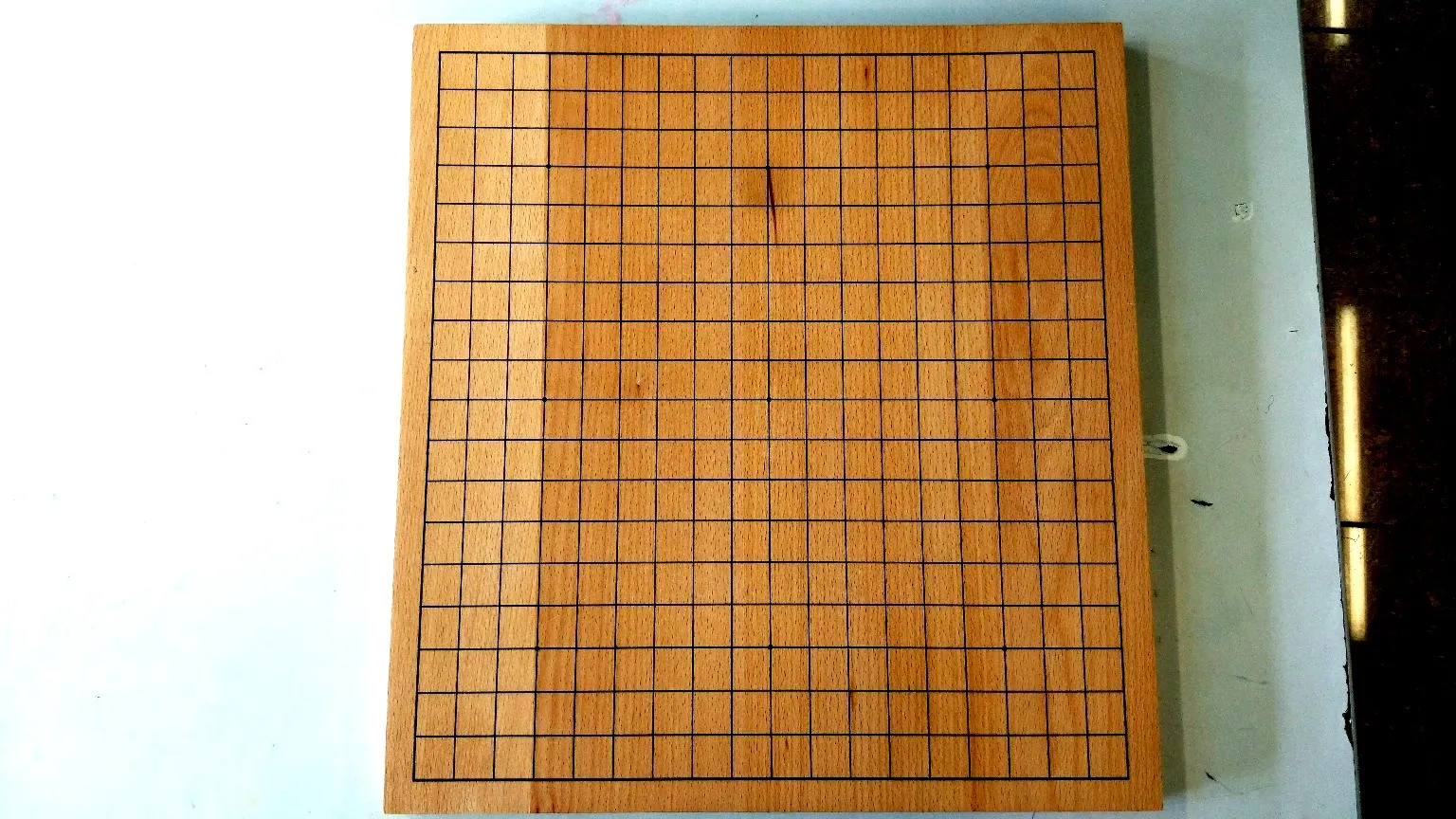
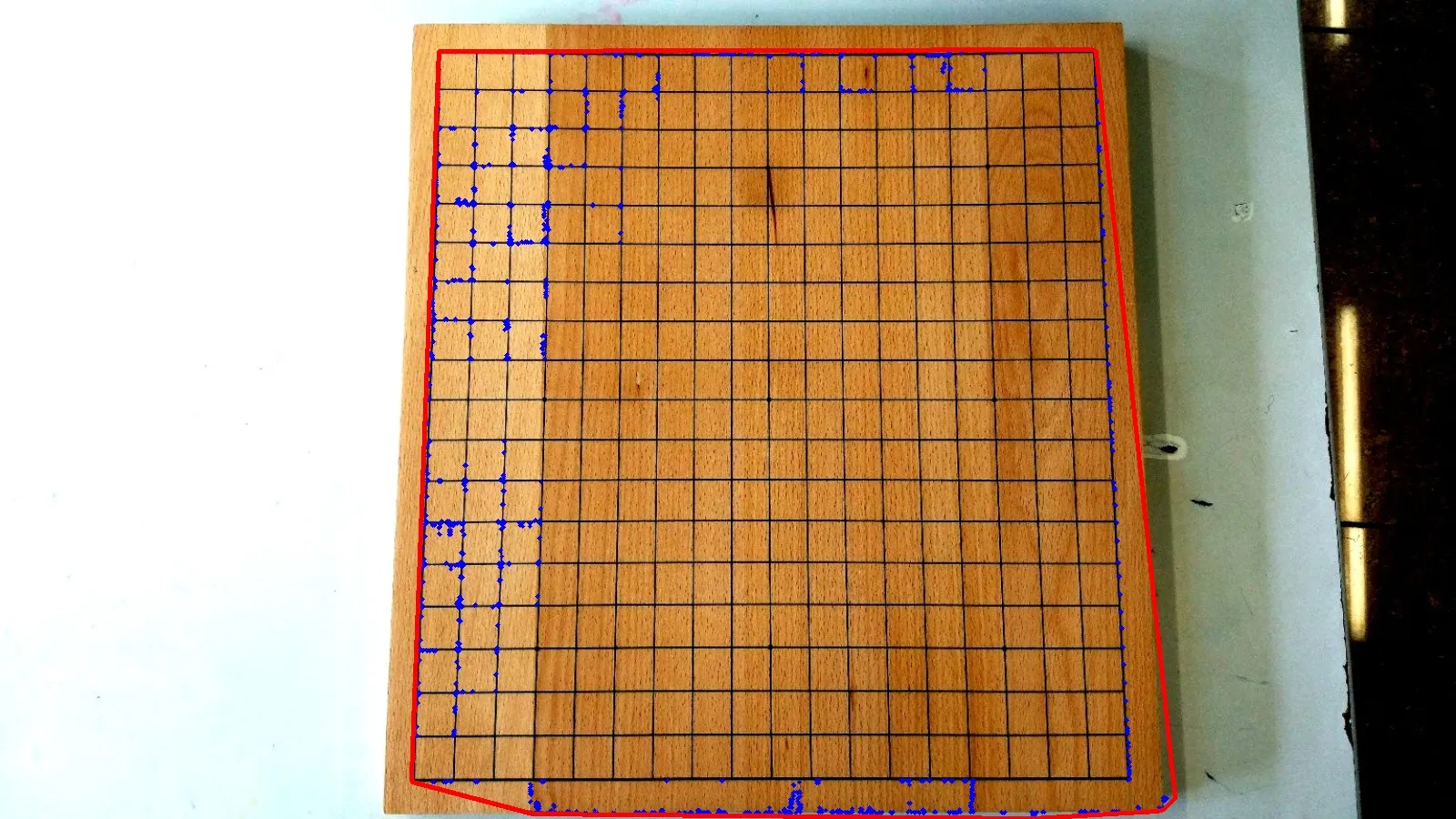
我需要找到一个围棋棋盘,并使用Python中的OpenCV2检测照片上的棋子,但是现在我遇到了检测棋盘的问题,同一轮廓中有奇怪的点,我不明白如何去除它们。这是我目前拥有的:
from skimage import exposure
import numpy as np
import argparse
import imutils
import cv2
ap = argparse.ArgumentParser()
ap.add_argument("-r", required = True,
help = "ratio", type=int, default = 800)
args = vars(ap.parse_args())
img = cv2.imread('3.jpg') #upload image and change resolution
ratio = img.shape[0] / args["r"]
orig = img.copy()
img = imutils.resize(img, height = args["r"])
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = cv2.bilateralFilter(gray, 11, 17, 17)
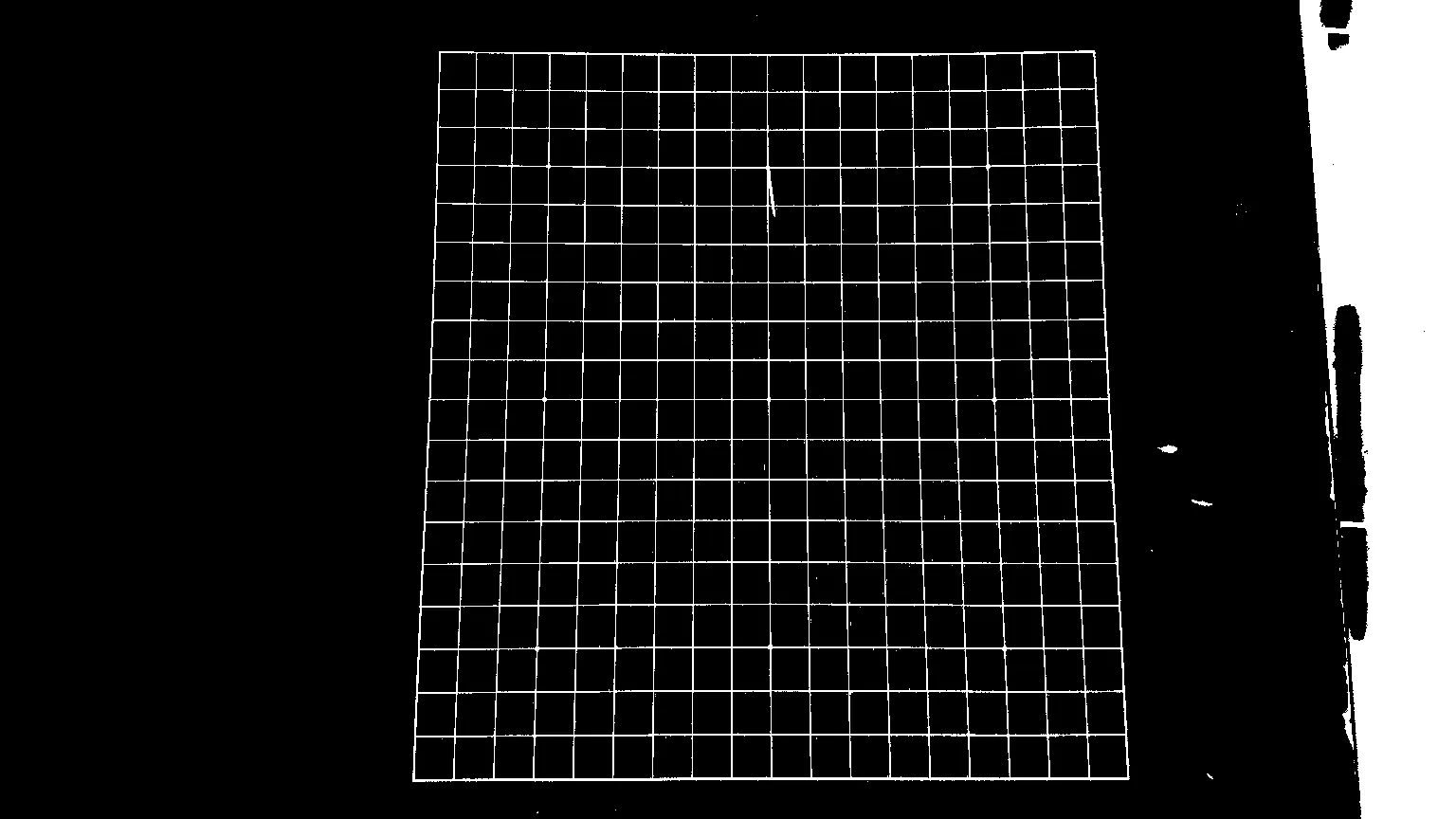
edged = cv2.Canny(gray, 30, 200)
cnts= cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE) #search contours and sorting them
cnts = imutils.grab_contours(cnts)
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:10]
screenCnt = None
for cnt in cnts:
rect = cv2.minAreaRect(cnt) # try to fit each contour in rectangle
box = cv2.boxPoints(rect)
box = np.int0(box)
area = int(rect[1][0]*rect[1][1]) # calculating contour area
if (area > 300000):
print(area)
cv2.drawContours(img, cnt, -1, (255, 0, 0), 4) #dots in contour
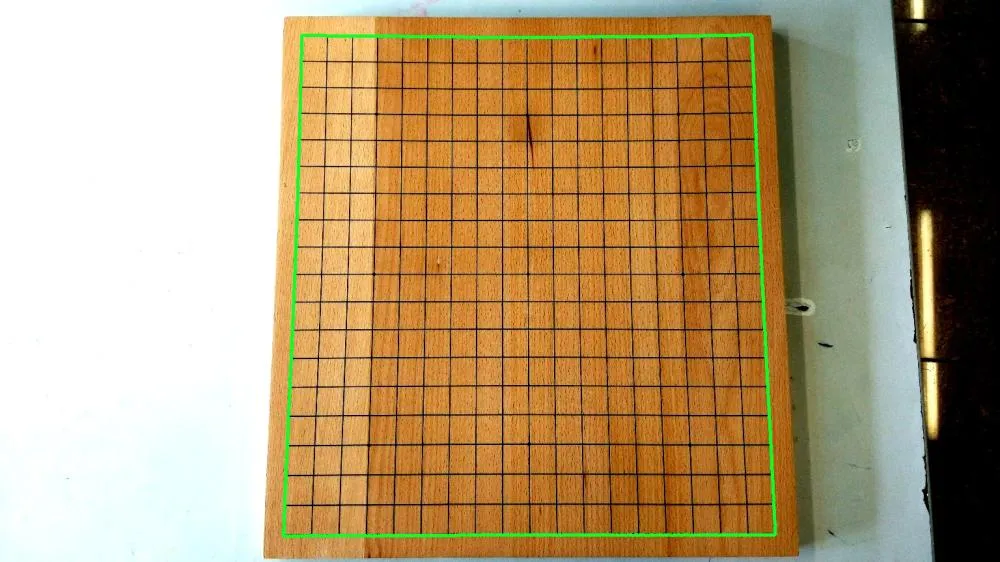
hull = cv2.convexHull(cnt) # calculating convex hull
cv2.drawContours(img, [hull], -1, (0, 0, 255), 3)
cv2.imshow("death", img)
cv2.waitKey(0)
源代码
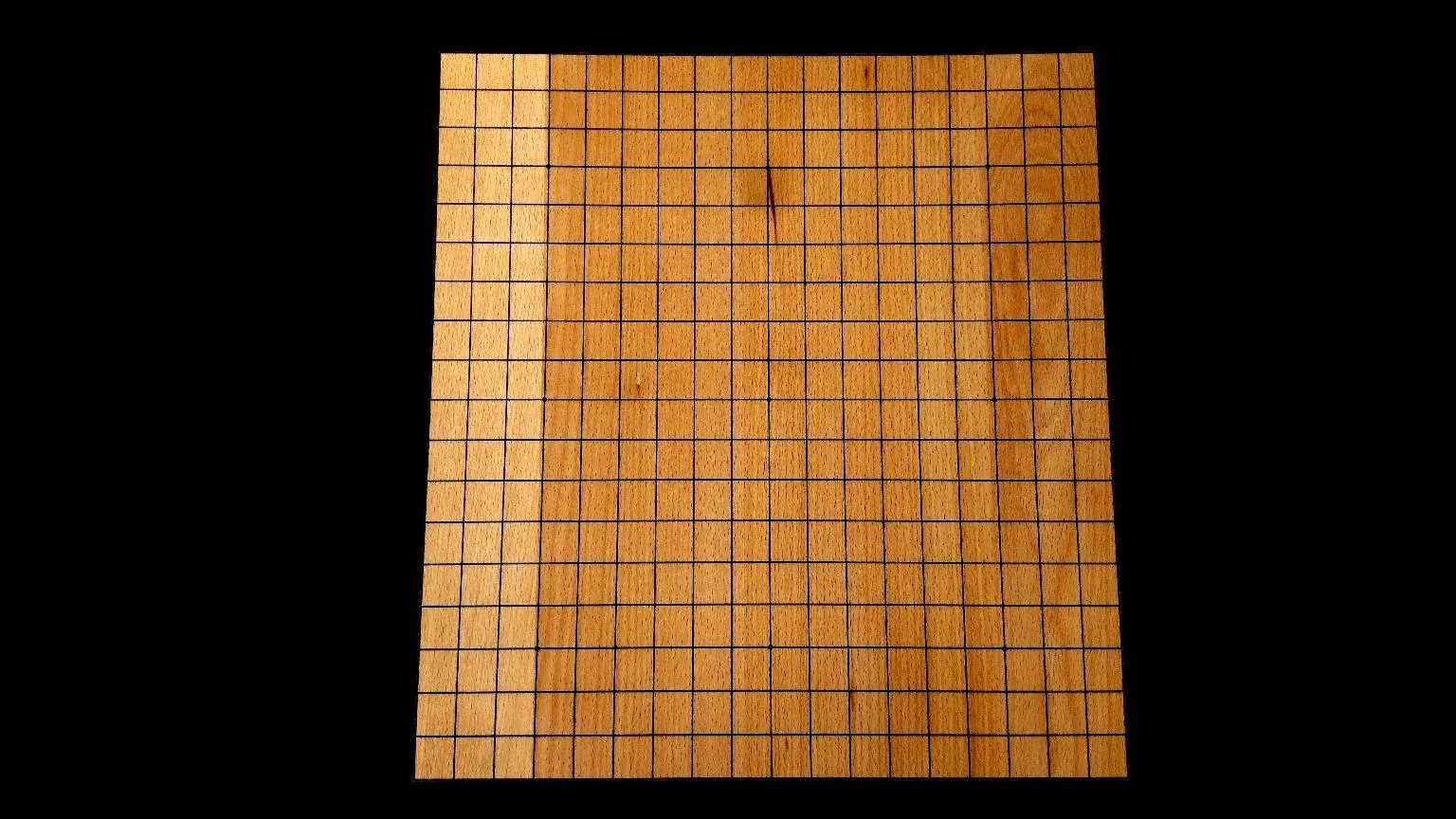
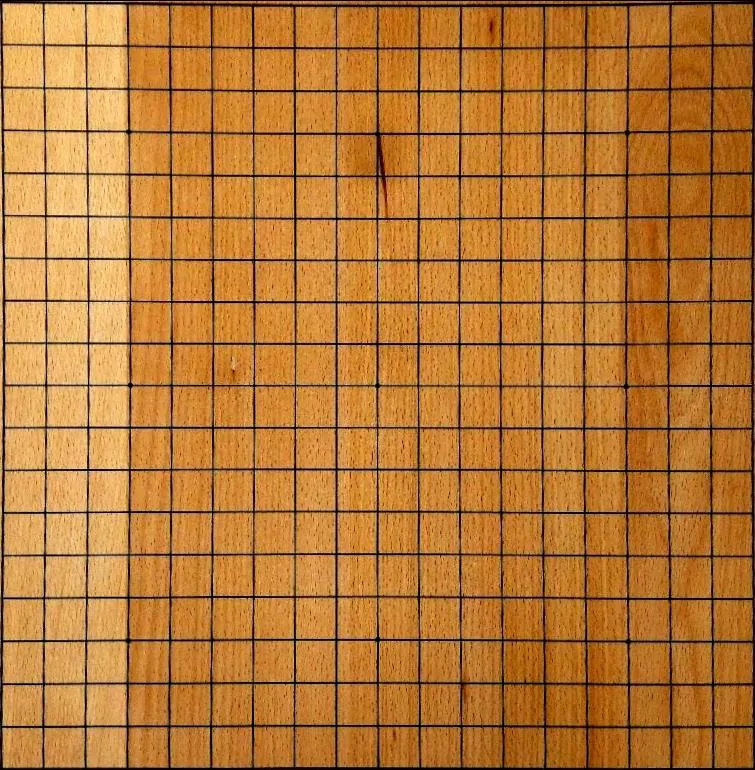
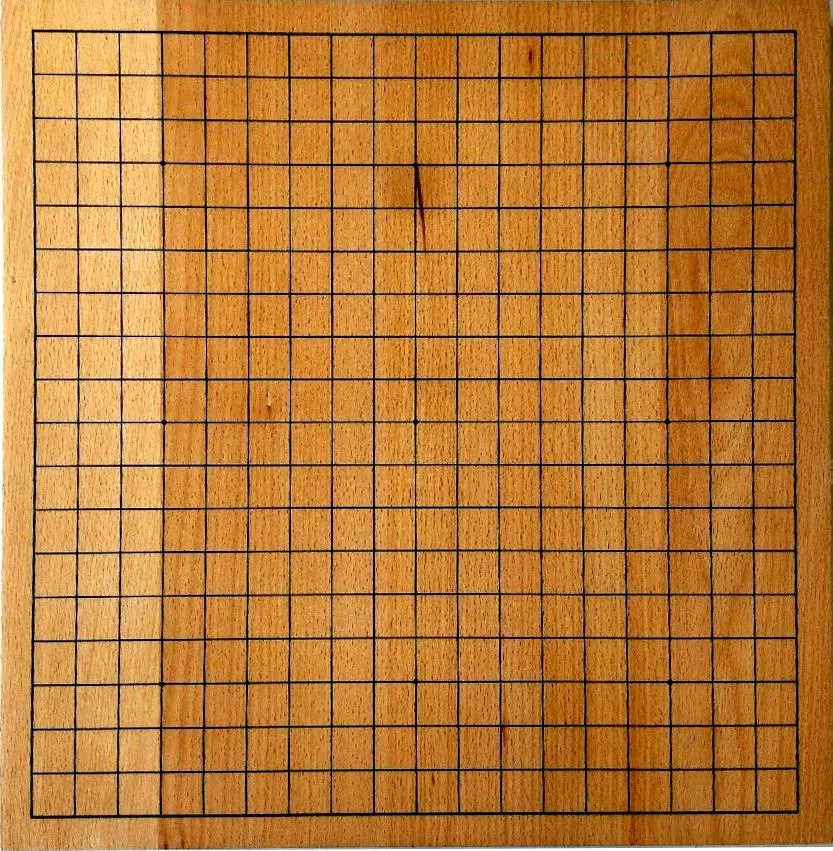
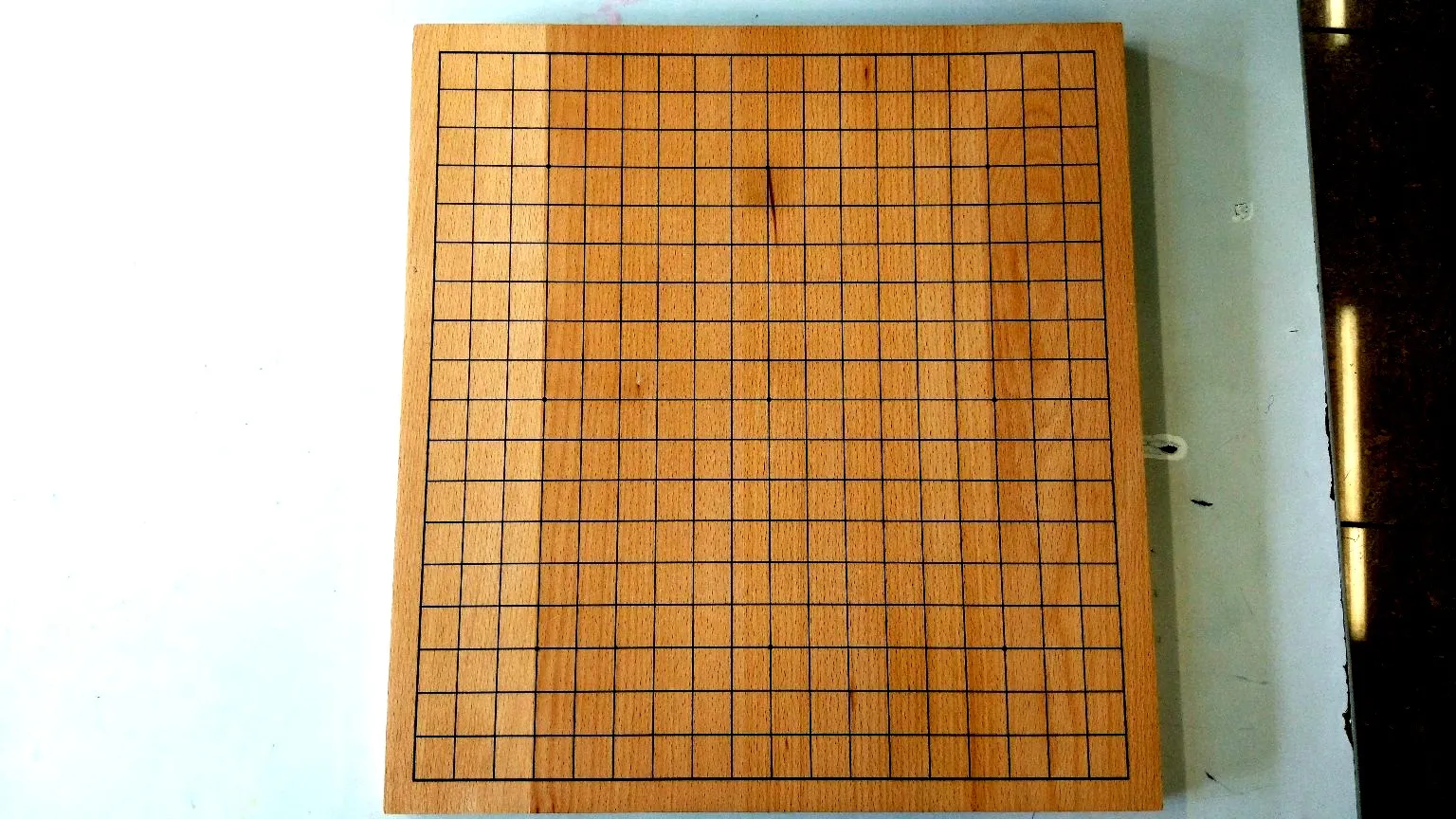
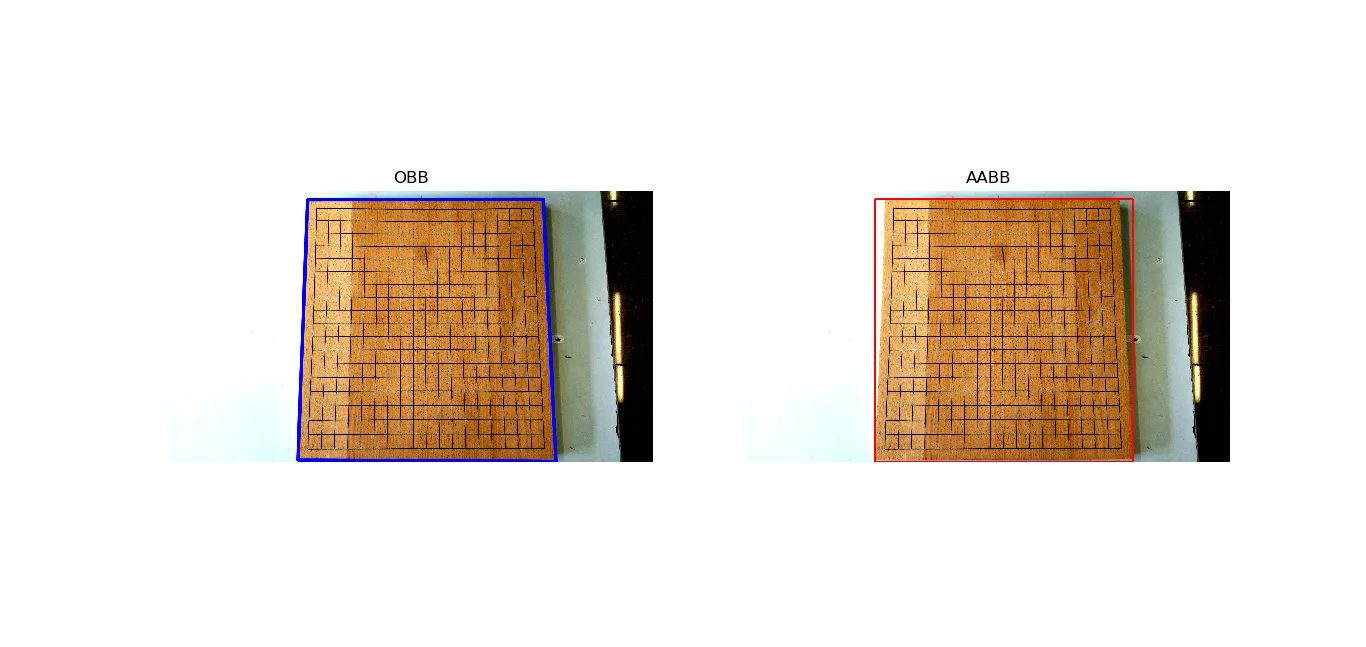
结果
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:10]中这样做了。 - zteffi