我正在尝试使用OpenCV 2.3.1和Visual Studio 2010(c++控制台应用程序)来校准网络摄像头。我正在使用这个类:
class CameraCalibrator{
private:
std::vector<std::vector<cv::Point3f>> objectPoints;
std::vector<std::vector<cv::Point2f>> imagePoints;
//Square Lenght
float squareLenght;
//output Matrices
cv::Mat cameraMatrix; //intrinsic
cv::Mat distCoeffs;
//flag to specify how calibration is done
int flag;
//used in image undistortion
cv::Mat map1,map2;
bool mustInitUndistort;
public:
CameraCalibrator(): flag(0), squareLenght(36.0), mustInitUndistort(true){};
int addChessboardPoints(const std::vector<std::string>& filelist,cv::Size& boardSize){
std::vector<std::string>::const_iterator itImg;
std::vector<cv::Point2f> imageCorners;
std::vector<cv::Point3f> objectCorners;
//initialize the chessboard corners in the chessboard reference frame
//3d scene points
for(int i = 0; i<boardSize.height; i++){
for(int j=0;j<boardSize.width;j++){
objectCorners.push_back(cv::Point3f(float(i)*squareLenght,float(j)*squareLenght,0.0f));
}
}
//2D Image points:
cv::Mat image; //to contain chessboard image
int successes = 0;
//cv::namedWindow("Chess");
for(itImg=filelist.begin(); itImg!=filelist.end(); itImg++){
image = cv::imread(*itImg,0);
bool found = cv::findChessboardCorners(image, boardSize, imageCorners);
//cv::drawChessboardCorners(image, boardSize, imageCorners, found);
//cv::imshow("Chess",image);
//cv::waitKey(1000);
cv::cornerSubPix(image, imageCorners, cv::Size(5,5),cv::Size(-1,-1),
cv::TermCriteria(cv::TermCriteria::MAX_ITER+cv::TermCriteria::EPS,30,0.1));
//if we have a good board, add it to our data
if(imageCorners.size() == boardSize.area()){
addPoints(imageCorners,objectCorners);
successes++;
}
}
return successes;
}
void addPoints(const std::vector<cv::Point2f>& imageCorners,const std::vector<cv::Point3f>& objectCorners){
//2D image point from one view
imagePoints.push_back(imageCorners);
//corresponding 3D scene points
objectPoints.push_back(objectCorners);
}
double calibrate(cv::Size &imageSize){
mustInitUndistort = true;
std::vector<cv::Mat> rvecs,tvecs;
return
cv::calibrateCamera(objectPoints, //the 3D points
imagePoints,
imageSize,
cameraMatrix, //output camera matrix
distCoeffs,
rvecs,tvecs,
flag);
}
void remap(const cv::Mat &image, cv::Mat &undistorted){
std::cout << cameraMatrix;
if(mustInitUndistort){ //called once per calibration
cv::initUndistortRectifyMap(
cameraMatrix,
distCoeffs,
cv::Mat(),
cameraMatrix,
image.size(),
CV_32FC1,
map1,map2);
mustInitUndistort = false;
}
//apply mapping functions
cv::remap(image,undistorted,map1,map2,cv::INTER_LINEAR);
}
};
我正在使用10张640x480分辨率的棋盘图像(假设这已足够进行校准)。主要函数如下:
int main(){
CameraCalibrator calibrateCam;
std::vector<std::string> filelist;
filelist.push_back("img10.jpg");
filelist.push_back("img09.jpg");
filelist.push_back("img08.jpg");
filelist.push_back("img07.jpg");
filelist.push_back("img06.jpg");
filelist.push_back("img05.jpg");
filelist.push_back("img04.jpg");
filelist.push_back("img03.jpg");
filelist.push_back("img02.jpg");
filelist.push_back("img01.jpg");
cv::Size boardSize(8,6);
double calibrateError;
int success;
success = calibrateCam.addChessboardPoints(filelist,boardSize);
std::cout<<"Success:" << success << std::endl;
cv::Size imageSize;
cv::Mat inputImage, outputImage;
inputImage = cv::imread("img10.jpg",0);
outputImage = inputImage.clone();
imageSize = inputImage.size();
calibrateError = calibrateCam.calibrate(imageSize);
std::cout<<"Calibration error:" << calibrateError << std::endl;
calibrateCam.remap(inputImage,outputImage);
cv::namedWindow("Original");
cv::imshow("Original",inputImage);
cv::namedWindow("Undistorted");
cv::imshow("Undistorted",outputImage);
cv::waitKey();
return 0;
}
一切都没有错误。cameraMatrix大致如下:
685.65 0 365.14
0 686.38 206.98
0 0 1
校准误差为0.310157,这是可以接受的。
但是当我使用remap时,输出图像比原始图像更糟糕。以下是示例:
原始图像: ]
]
无畸变图像: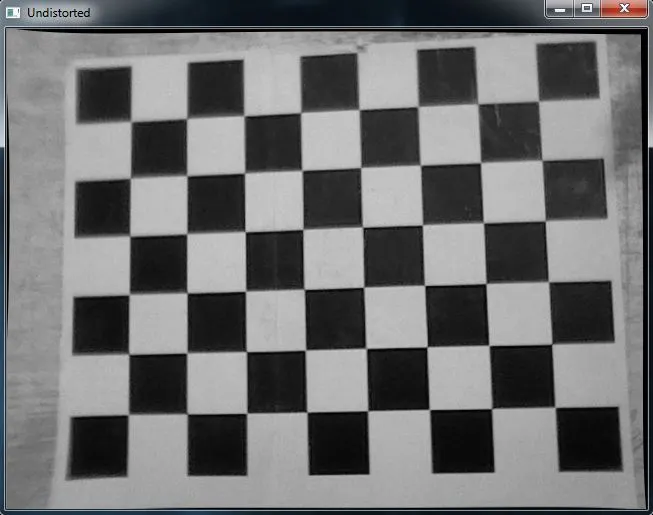 ]
]
所以问题是,在校准过程中我是否做错了什么?10张不同的棋盘图像是否足够进行校准?您有什么建议吗?