我有一个由约束德劳内三角剖分表示的区域。我正在尝试解决在两个点之间寻找路径的问题。我使用Marcelo Kallmann提供的论文作为参考来解决这个问题。然而,我计划使用A*搜索算法代替Kallmann提出的Chazelle漏斗算法paper link,该算法可以在网格环境中高效地规划路径。
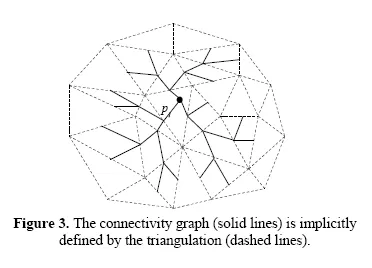
对于启发式成本函数,我使用当前节点到目标节点的欧几里得距离,并选择邻居节点时,我从当前点p绘制一条线段到三角形边缘的中点。[这个想法是Kallmann提出的]邻居节点之间的距离也由它们之间的欧几里得距离给出。
这是Kallmann的图例,展示了使用边缘中点技术生成到包含目标节点的三角形的各种路径。 ,那么是否有办法通过使用IDA*或ID-DFS等其他技术来提高算法效率?已经提出了一个三角剖分减少A*(TRA*)的方法,但由于过于正式定义,我无法理解它。TRA*方法的详细信息可以在Demyen的thesis第5节中找到。我希望能听取一些意见。如果需要共享某些代码,我会编辑此帖子。
,那么是否有办法通过使用IDA*或ID-DFS等其他技术来提高算法效率?已经提出了一个三角剖分减少A*(TRA*)的方法,但由于过于正式定义,我无法理解它。TRA*方法的详细信息可以在Demyen的thesis第5节中找到。我希望能听取一些意见。如果需要共享某些代码,我会编辑此帖子。
对于启发式成本函数,我使用当前节点到目标节点的欧几里得距离,并选择邻居节点时,我从当前点p绘制一条线段到三角形边缘的中点。[这个想法是Kallmann提出的]邻居节点之间的距离也由它们之间的欧几里得距离给出。
这是Kallmann的图例,展示了使用边缘中点技术生成到包含目标节点的三角形的各种路径。
,那么是否有办法通过使用IDA*或ID-DFS等其他技术来提高算法效率?已经提出了一个三角剖分减少A*(TRA*)的方法,但由于过于正式定义,我无法理解它。TRA*方法的详细信息可以在Demyen的thesis第5节中找到。我希望能听取一些意见。如果需要共享某些代码,我会编辑此帖子。