我正在我的手肘上使用乒乓球。我可以使用Python中的OpenCV跟踪它并提取每个帧中的x和y,但问题是:我还需要z。因此,我在冠状平面上添加了第二个相机。
如果您不熟悉,请参考以下图片:
如果您不熟悉,请参考以下图片:
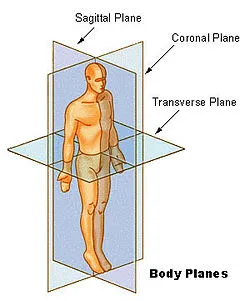
我的第一个摄像头是在矢状面上。我不知道如何进行同步。有什么建议吗?
然后,您的第一个网络摄像头位于(0,0,0),第二个网络摄像头位于(例如15,16,0)。从那里,您可以轻松推导出图像之间的转换,参见此wiki
这是90度旋转+平移,因此如果您的旋转沿z轴,则转换矩阵将为:
0 1 15
-1 0 16
0 0 1
或者
0 -1 15
1 0 16
0 0 1
取决于旋转是否为+或-90度。如果您有疑问,请查看您的数据。
grab捕获两个摄像头,然后再使用retrieve,但仍会有轻微的延迟。 - Azad