我需要从俯视视频中追踪道路上的汽车。
我的应用程序包含两个主要部分:
1. 检测帧中的汽车(Tensorflow训练网络) 2. 跟踪检测到的汽车(opencv跟踪器)
我在使用opencv跟踪器时遇到了麻烦。最初我尝试了不同的跟踪器,但只有MOSSE足够快。这个跟踪器对于直线道路的情况几乎完美,但我在转弯的汽车上遇到了问题。这种情况出现在十字路口上。
据我所知,旋转对象的边界框比水平或垂直对象的bbox大。因此bbox包含静态背景的大部分,跟踪器会失去目标对象。
是否有任何替代跟踪器可以跟踪轮廓(而不是边界框)? 我能否通过任何设置或调整图片来调整现有opencv跟踪器的结果质量?
图示: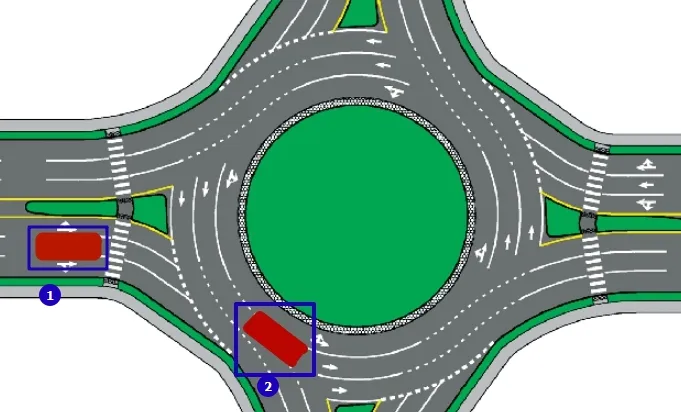 真实图像:
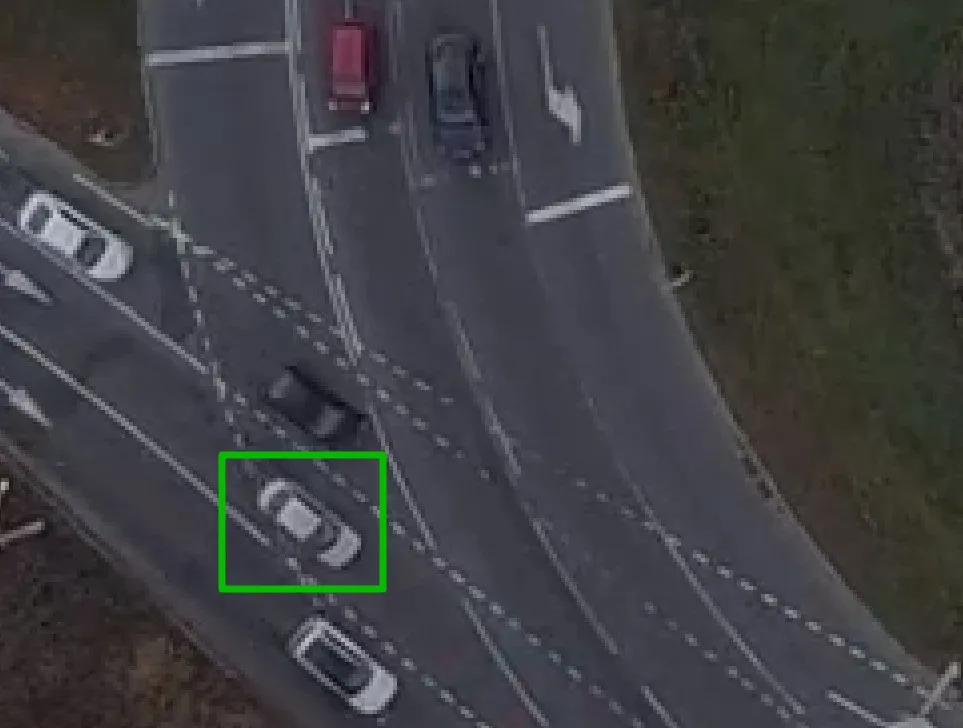
真实图像:
我的应用程序包含两个主要部分:
1. 检测帧中的汽车(Tensorflow训练网络) 2. 跟踪检测到的汽车(opencv跟踪器)
我在使用opencv跟踪器时遇到了麻烦。最初我尝试了不同的跟踪器,但只有MOSSE足够快。这个跟踪器对于直线道路的情况几乎完美,但我在转弯的汽车上遇到了问题。这种情况出现在十字路口上。
据我所知,旋转对象的边界框比水平或垂直对象的bbox大。因此bbox包含静态背景的大部分,跟踪器会失去目标对象。
是否有任何替代跟踪器可以跟踪轮廓(而不是边界框)? 我能否通过任何设置或调整图片来调整现有opencv跟踪器的结果质量?
图示:
真实图像: