我已经花费了数周时间研究如何检测由机器生成的坏点,但仍然无法找到最佳解决方案。我想知道是否有人可以提供一些关于此问题的线索。
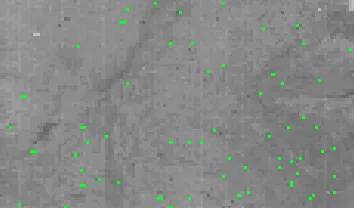
以下是受损图像的示例。坏点非常明显,通常为亮或暗点。这些点具有以下特征:
相对较大或较小的强度。
它们大多是一个或两个相邻的像素。

我尝试过:
将它们视为Harris Conner,并使用更大的梯度来检测它们。但是,边缘上的某些点也具有较大的梯度。此外,梯度阈值不易固定。较小的阈值会引入假阳性,而较大的阈值则引入假阴性。
由于坏点与其局部区域相比具有较大或较小的强度,因此我计算中心点以外的平均强度,并将其与中心点进行比较。但是,一些具有较大或较小强度的正常点可能会被此方法错误分类。同时,平均值和中心点之间差异的阈值也很难固定。
我还尝试提取一些特征来对点进行分类,并将它们分类为坏点或好点。虽然我的分类器达到了96%的准确率,但由于图像中的点数量众多(6000,000),这可能会导致许多点被错误分类。
我想知道是否有一些深度学习点检测模式?我想尝试使用它们以查看是否可以实现99.99 ...%的准确率。
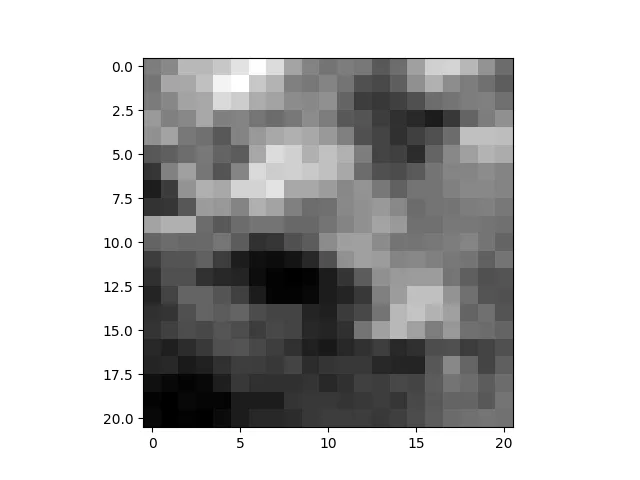
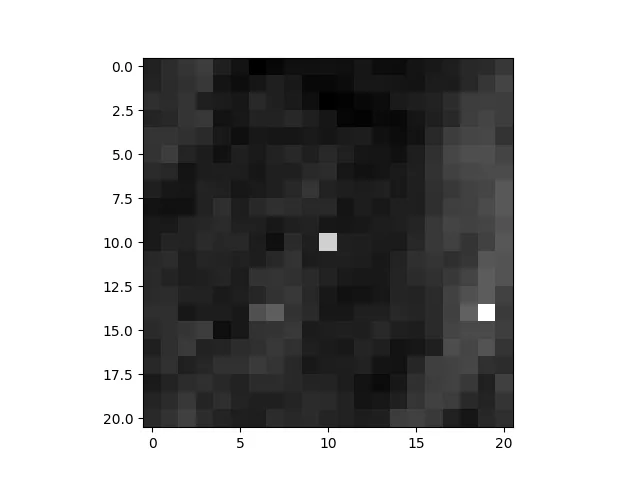
此外,以下示例是受损图像和正常图像。虽然它们在人类眼中非常明显,但我无法想出一个完美的方法来让计算机区分它们。
带有一些亮像素的正常图像:
带有两个坏点的受损图像:
如果您能提供一些关于此问题的线索,我将不胜感激。非常感谢!