我有一个领域中的点列表(例如upper_goal_point/left_upper_outer_corner等)。
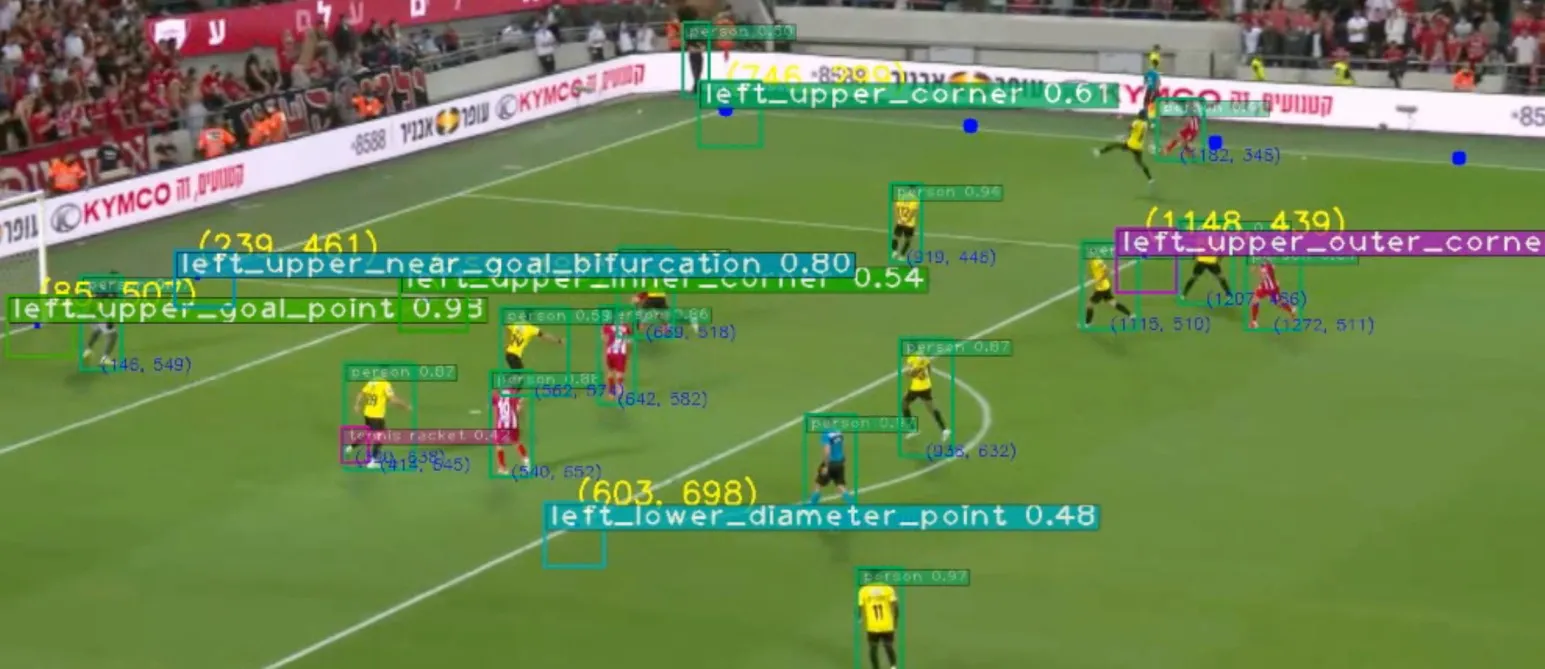
我知道它们在目标图像中的相应坐标 - 因此我可以计算出单应性:
h, status = cv2.findHomography(pts_src, pts_dst)
我在上角线上也有蓝色点(请参见上图),我只知道它们的目标
y坐标为0(因为它们在上方线上),但我不知道它们确切的位置在哪里。我能否使用这些蓝点来改善单应性?
附言:
您可以看到单应性中的
上角线不是水平线,而是对角线,这当然是不正确的:

cv2.findHomography结果的评估进行更新。 因此,可能可以构建一个迭代方法(findHomography->更新x->findHomography->更新x...)。 - fana