我正在使用以下代码来匹配两张图像的surf特征,但无法裁剪和对齐图像。
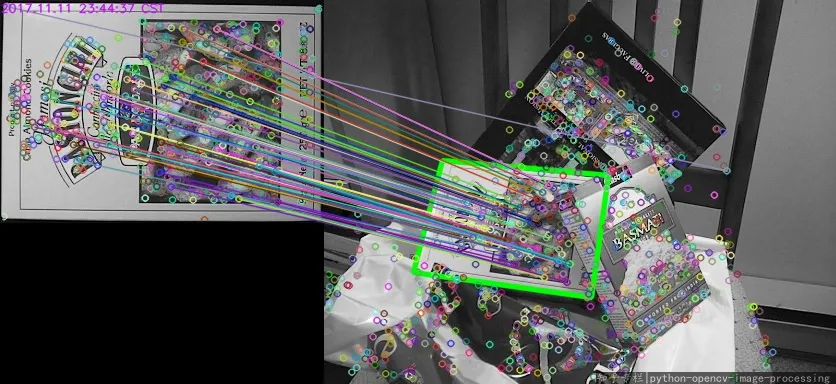
原始图像、旋转后的图像和匹配后的图像如下所示。
我想把旋转后的图像像原始图像一样变直,并裁剪成对齐的图像。我尝试了几何变换,但未能成功对齐图像。
原始图像、旋转后的图像和匹配后的图像如下所示。
我想把旋转后的图像像原始图像一样变直,并裁剪成对齐的图像。我尝试了几何变换,但未能成功对齐图像。
import numpy
import cv2
############### Image Matching ###############
def match_images(img1, img2):
"""Given two images, returns the matches"""
detector = cv2.SURF(400, 5, 5)
matcher = cv2.BFMatcher(cv2.NORM_L2)
kp1, desc1 = detector.detectAndCompute(img1, None)
kp2, desc2 = detector.detectAndCompute(img2, None)
raw_matches = matcher.knnMatch(desc1, trainDescriptors = desc2, k = 2)
kp_pairs = filter_matches(kp1, kp2, raw_matches)
return kp_pairs
def filter_matches(kp1, kp2, matches, ratio = 0.75):
mkp1, mkp2 = [], []
for m in matches:
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
m = m[0]
mkp1.append( kp1[m.queryIdx] )
mkp2.append( kp2[m.trainIdx] )
kp_pairs = zip(mkp1, mkp2)
return kp_pairs
############### Match Diplaying ###############
def explore_match(win, img1, img2, kp_pairs, status = None, H = None):
h1, w1 = img1.shape[:2]
h2, w2 = img2.shape[:2]
vis = numpy.zeros((max(h1, h2), w1+w2), numpy.uint8)
vis[:h1, :w1] = img1
vis[:h2, w1:w1+w2] = img2
vis = cv2.cvtColor(vis, cv2.COLOR_GRAY2BGR)
if H is not None:
corners = numpy.float32([[0, 0], [w1, 0], [w1, h1], [0, h1]])
corners = numpy.int32( cv2.perspectiveTransform(corners.reshape(1, -1, 2), H).reshape(-1, 2) + (w1, 0) )
cv2.polylines(vis, [corners], True, (255, 255, 255))
if status is None:
status = numpy.ones(len(kp_pairs), numpy.bool_)
p1 = numpy.int32([kpp[0].pt for kpp in kp_pairs])
p2 = numpy.int32([kpp[1].pt for kpp in kp_pairs]) + (w1, 0)
green = (0, 255, 0)
red = (0, 0, 255)
white = (255, 255, 255)
kp_color = (51, 103, 236)
for (x1, y1), (x2, y2), inlier in zip(p1, p2, status):
if inlier:
col = green
cv2.circle(vis, (x1, y1), 2, col, -1)
cv2.circle(vis, (x2, y2), 2, col, -1)
else:
col = red
r = 2
thickness = 3
cv2.line(vis, (x1-r, y1-r), (x1+r, y1+r), col, thickness)
cv2.line(vis, (x1-r, y1+r), (x1+r, y1-r), col, thickness)
cv2.line(vis, (x2-r, y2-r), (x2+r, y2+r), col, thickness)
cv2.line(vis, (x2-r, y2+r), (x2+r, y2-r), col, thickness)
vis0 = vis.copy()
for (x1, y1), (x2, y2), inlier in zip(p1, p2, status):
if inlier:
cv2.line(vis, (x1, y1), (x2, y2), green)
cv2.imshow(win, vis)
cv2.waitKey(0)
cv2.destroyAllWindows()
def draw_matches(window_name, kp_pairs, img1, img2):
"""Draws the matches for """
mkp1, mkp2 = zip(*kp_pairs)
p1 = numpy.float32([kp.pt for kp in mkp1])
p2 = numpy.float32([kp.pt for kp in mkp2])
if len(kp_pairs) >= 4:
H, status = cv2.findHomography(p1, p2, cv2.RANSAC, 5.0)
else:
H, status = None, None
if len(p1):
explore_match(window_name, img1, img2, kp_pairs, status, H)
############### Test ###############
img1 = cv2.imread('orig.jpg', 0)
img2 = cv2.imread('rota.jpg', 0)
cv2.imshow('REAL',img1)
cv2.imshow('Rotated',img2)
#img_1= cv2.resize(img1,(500,600))
#img_2= cv2.resize(img2,(500,600))
kp_pairs = match_images(img1, img2)
if kp_pairs:
draw_matches('Matching Features', kp_pairs, img1, img2)
else:
print "No matches found"