我有一个服务器函数,可以从图像中检测和估计aruco标记的姿态。使用
这个姿态中放置的3D物体位置是完全随机的。
我做错了什么?
这是估计和绘制轴之后从服务器图像中获取的快照。我收到的图像旋转了90度,不确定是否与任何相关内容有关。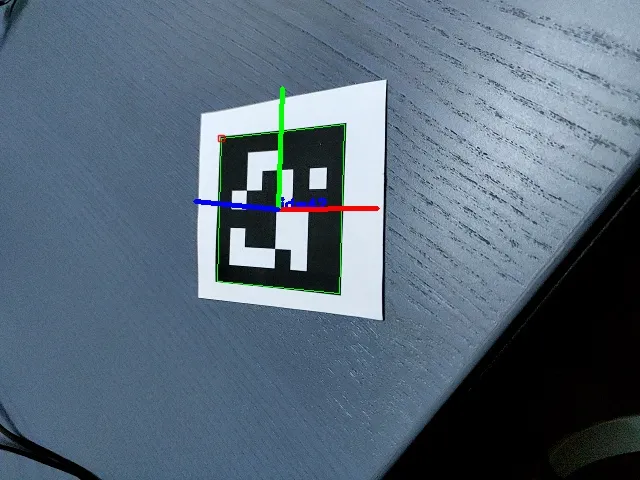
estimatePoseSingleMarkers函数,我找到了旋转和平移向量。我需要在Android应用程序中使用ARCore使用此值创建姿态。文档说明姿态需要两个浮点数数组(旋转和平移):https://developers.google.com/ar/reference/java/arcore/reference/com/google/ar/core/Pose。float[] newT = new float[] { t[0], t[1], t[2] };
Quaternion q = Quaternion.axisAngle(new Vector3(r[0], r[1], r[2]), 90);
float[] newR = new float[]{ q.x, q.y, q.z, q.w };
Pose pose = new Pose(newT, newR);
这个姿态中放置的3D物体位置是完全随机的。
我做错了什么?
这是估计和绘制轴之后从服务器图像中获取的快照。我收到的图像旋转了90度,不确定是否与任何相关内容有关。