我需要计算矢量场的旋度并使用matplotlib绘制它。一个简单的例子如下:
如何在matplotlib图库中的quiver3d_demo.py中计算和绘制矢量场的旋度?
你可以使用sympy.curl()来计算矢量场的旋度。
示例:
假设F(x,y,z) = y2zi - xyj + z2k,则:
y将是R[1],x是R[0],z是R[2]R.x,R.y和R.z。计算矢量场旋度的代码如下:
from sympy.physics.vector import ReferenceFrame
from sympy.physics.vector import curl
R = ReferenceFrame('R')
F = R[1]**2 * R[2] * R.x - R[0]*R[1] * R.y + R[2]**2 * R.z
G = curl(F, R)
那么,如果G等于R_y**2*R.y + (-2*R_y*R_z - R_y)*R.z,换句话说,
G = 0i + y2j + (-2yz-y)k.
要绘制它,您需要将上述结果转换为3个单独的函数:u、v和w。
(以下示例改编自此 matplotlib 示例):
from mpl_toolkits.mplot3d import axes3d
import matplotlib.pyplot as plt
import numpy as np
fig = plt.figure()
ax = fig.gca(projection='3d')
x, y, z = np.meshgrid(np.arange(-0.8, 1, 0.2),
np.arange(-0.8, 1, 0.2),
np.arange(-0.8, 1, 0.8))
u = 0
v = y**2
w = -2*y*z - y
ax.quiver(x, y, z, u, v, w, length=0.1)
plt.show()
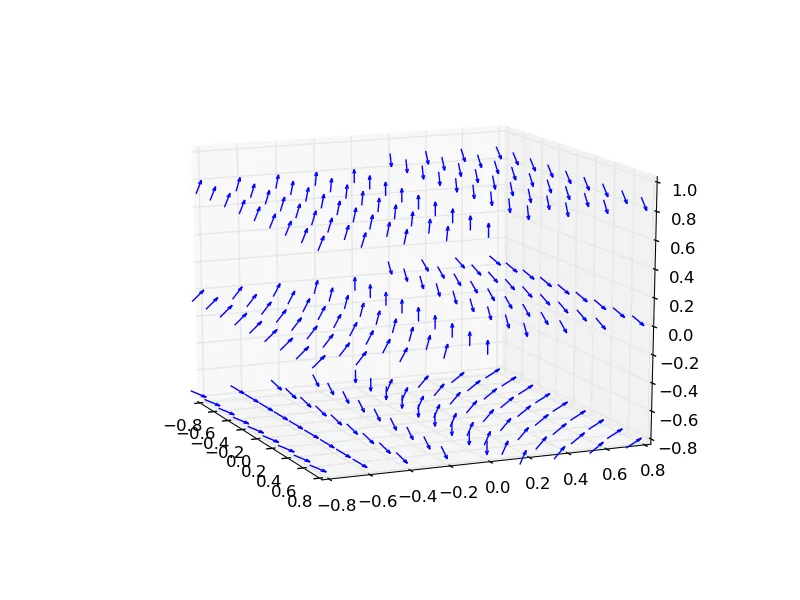
最终结果如下:
curl()函数,但它可以计算一个或多个变量的向量值函数的Jacobian矩阵,并提供相对于所有变量的向量场所有分量的导数;这就是计算旋度所必需的全部内容。import import scipy as sp
import numdifftools as nd
def h(x):
return sp.array([3*x[0]**2,4*x[1]*x[2]**3, 2*x[0]])
def curl(f,x):
jac = nd.Jacobian(f)(x)
return sp.array([jac[2,1]-jac[1,2],jac[0,2]-jac[2,0],jac[1,0]-jac[0,1]])
x = sp.array([1,2,3)]
curl(h,x)
x 处的 curl 值: array([-216., -2., 0.])。按照上述建议进行绘图即可。import numpy as np
def curl(x,y,z,u,v,w):
dx = x[0,:,0]
dy = y[:,0,0]
dz = z[0,0,:]
dummy, dFx_dy, dFx_dz = np.gradient (u, dx, dy, dz, axis=[1,0,2])
dFy_dx, dummy, dFy_dz = np.gradient (v, dx, dy, dz, axis=[1,0,2])
dFz_dx, dFz_dy, dummy = np.gradient (w, dx, dy, dz, axis=[1,0,2])
rot_x = dFz_dy - dFy_dz
rot_y = dFx_dz - dFz_dx
rot_z = dFy_dx - dFx_dy
l = np.sqrt(np.power(u,2.0) + np.power(v,2.0) + np.power(w,2.0));
m1 = np.multiply(rot_x,u)
m2 = np.multiply(rot_y,v)
m3 = np.multiply(rot_z,w)
tmp1 = (m1 + m2 + m3)
tmp2 = np.multiply(l,2.0)
av = np.divide(tmp1, tmp2)
return rot_x, rot_y, rot_z, av
curl函数,并且还处理绘图(使用matplotlib作为后端),但我从未使用过它。 - cphlewis