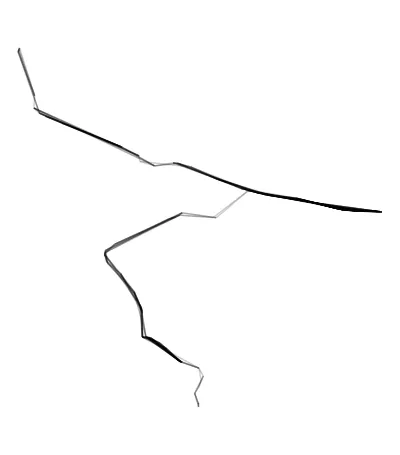
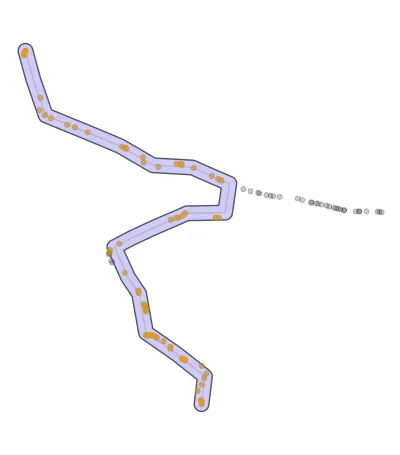
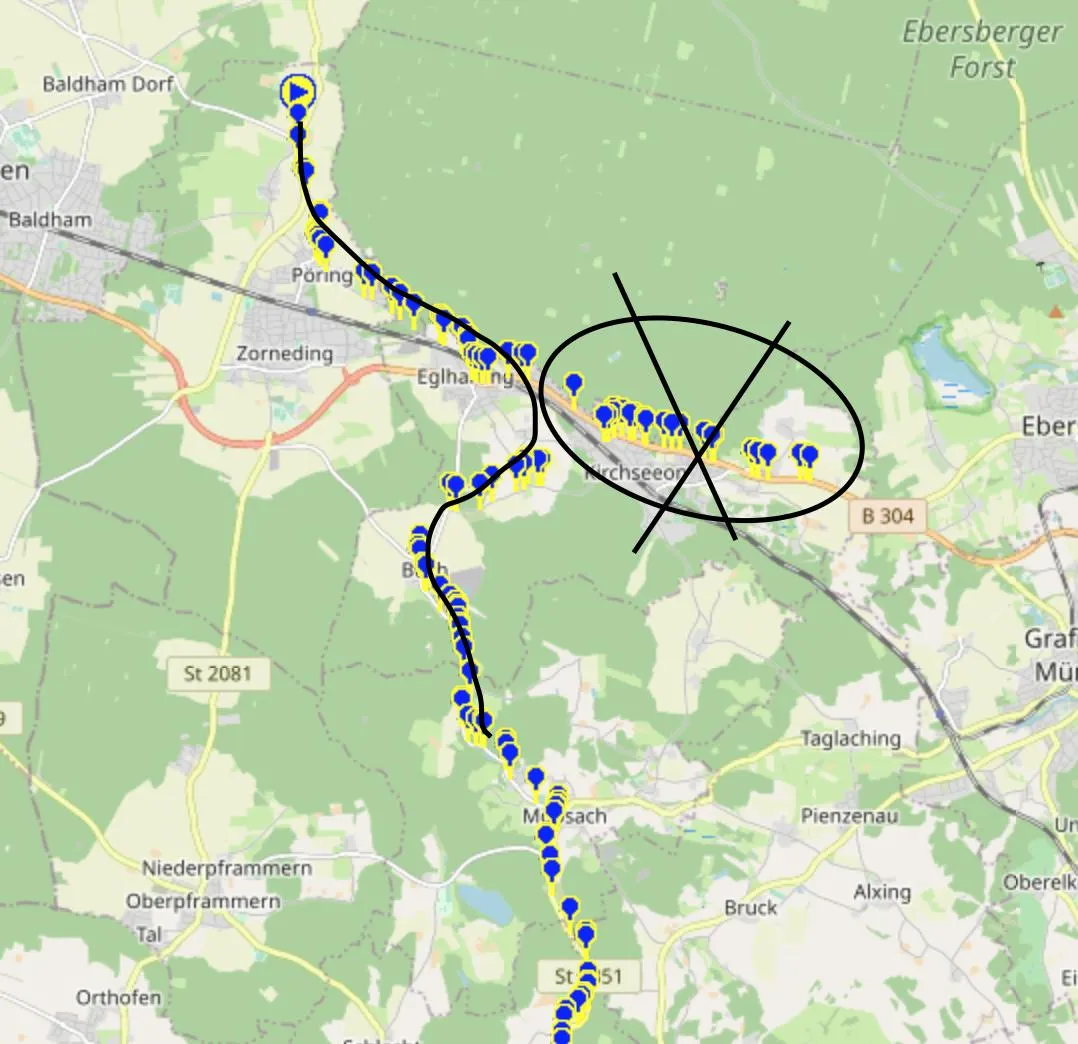
有没有办法过滤掉不属于主路径的部分?如您在图片中所见,我想删除被划掉的部分,同时保留主路径。我已经尝试使用zoo/rolling median,但没有成功。我认为我可以使用某种核来完成这个任务,但我不确定。我还尝试了不同的平滑方法/函数,但这些方法并没有产生期望的结果,反而使情况更糟。
数据中的Dist值可以忽略。
一种方法可能是: 1.取前n个点 2.获取平均/中位数方位角 3.比较n+1点的方位角 4.如果方位角与n个点的平均值相差太大,则舍弃该点。
所以我的路径查找算法的错误是向“前”走然后返回同样的路线。我正在尝试识别和过滤出这种情况。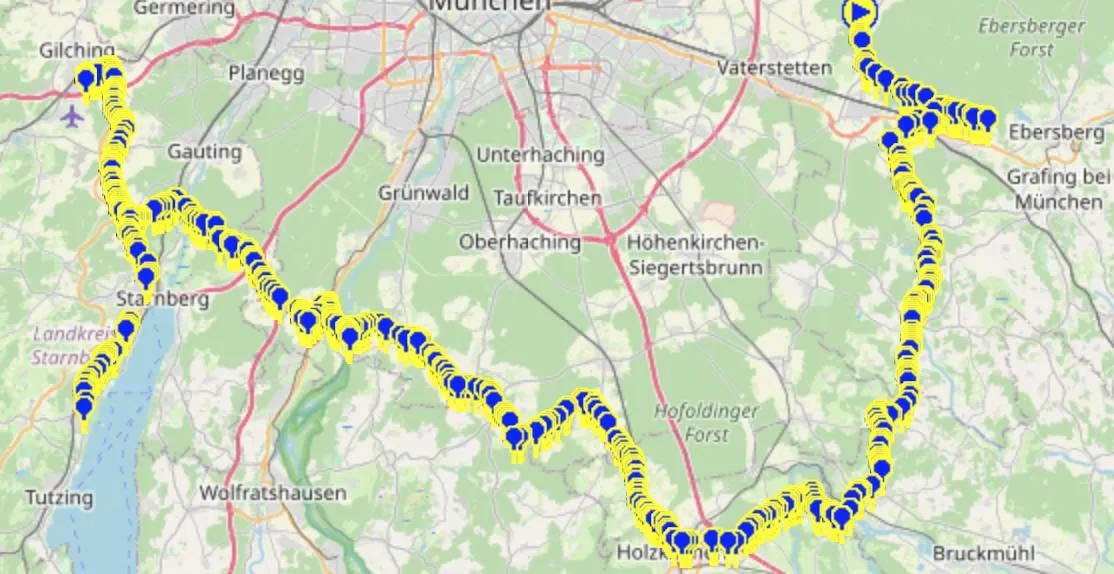 mrhellmann提供的解决方案在637个点上运行需要约6秒。BrianLang提供的解决方案也需要6秒运行。
现在唯一的区别在于包的使用和优化的可能性。
mrhellmann提供的解决方案在637个点上运行需要约6秒。BrianLang提供的解决方案也需要6秒运行。
现在唯一的区别在于包的使用和优化的可能性。
一种方法可能是: 1.取前n个点 2.获取平均/中位数方位角 3.比较n+1点的方位角 4.如果方位角与n个点的平均值相差太大,则舍弃该点。
所以我的路径查找算法的错误是向“前”走然后返回同样的路线。我正在尝试识别和过滤出这种情况。
path<-structure(list(counter = 1:100, lon = c(11.83000844, 11.82986091,
11.82975536, 11.82968137, 11.82966589, 11.83364579, 11.83346388,
11.83479848, 11.83630055, 11.84026754, 11.84215965, 11.84530872,
11.85369492, 11.85449806, 11.85479096, 11.85888555, 11.85908087,
11.86262424, 11.86715538, 11.86814045, 11.86844252, 11.87138302,
11.87579809, 11.87736704, 11.87819829, 11.88358436, 11.88923677,
11.89024638, 11.89091832, 11.90027148, 11.9027736, 11.90408114,
11.9063466, 11.9068819, 11.90833199, 11.91121547, 11.91204623,
11.91386018, 11.91657306, 11.91708085, 11.91761264, 11.91204623,
11.90833199, 11.90739525, 11.90583785, 11.904688, 11.90191917,
11.90143671, 11.90027148, 11.89806126, 11.89694917, 11.89249712,
11.88750445, 11.88720159, 11.88532786, 11.87757307, 11.87681905,
11.86930751, 11.86872102, 11.8676844, 11.86696599, 11.86569006,
11.85307297, 11.85078596, 11.85065013, 11.85055277, 11.85054529,
11.85105901, 11.8513188, 11.85441234, 11.85771987, 11.85784653,
11.85911367, 11.85937322, 11.85957177, 11.85964041, 11.85962915,
11.8596438, 11.85976783, 11.86056853, 11.86078973, 11.86122148,
11.86172538, 11.86227576, 11.86392935, 11.86563636, 11.86562302,
11.86849157, 11.86885719, 11.86901696, 11.86930676, 11.87338922,
11.87444184, 11.87391755, 11.87329231, 11.8723503, 11.87316759,
11.87325551, 11.87332646, 11.87329074), lat = c(48.10980039,
48.10954023, 48.10927434, 48.10891122, 48.10873965, 48.09824039,
48.09526792, 48.0940306, 48.09328273, 48.09161348, 48.09097173,
48.08975325, 48.08619985, 48.08594538, 48.08576984, 48.08370241,
48.08237208, 48.08128785, 48.08204915, 48.08193609, 48.08186387,
48.08102563, 48.07902278, 48.07827614, 48.07791392, 48.07583181,
48.07435852, 48.07418376, 48.07408811, 48.07252594, 48.07207418,
48.07174377, 48.07108668, 48.07094458, 48.07061937, 48.07033965,
48.07033089, 48.07034706, 48.07025797, 48.07020637, 48.07014061,
48.07033089, 48.07061937, 48.07081572, 48.07123129, 48.07156883,
48.07224388, 48.07232886, 48.07252594, 48.07313464, 48.07346191,
48.07389275, 48.0748072, 48.07488497, 48.07531827, 48.06876325,
48.06880849, 48.06992189, 48.06935392, 48.0688597, 48.06872843,
48.0682826, 48.06236784, 48.06083756, 48.06031525, 48.06007589,
48.05979028, 48.05819348, 48.05773109, 48.05523588, 48.05084893,
48.0502925, 48.04750087, 48.0471574, 48.04655424, 48.04615637,
48.04573796, 48.03988503, 48.03985935, 48.03986151, 48.03984645,
48.0397989, 48.03966795, 48.03925767, 48.03841738, 48.03701502,
48.03658961, 48.03417456, 48.03394195, 48.03386125, 48.03372952,
48.03236277, 48.03045774, 48.02935764, 48.02770804, 48.0262546,
48.02391112, 48.02376389, 48.02361916, 48.02295931), dist = c(16.5491019417617,
12.387608371535, 13.7541383821868, 33.4916122880205, 6.9703128008864,
30.9036305788955, 8.61214448946505, 25.0174570393888, 37.1966950033338,
114.428731827878, 42.6981252797486, 35.484064302826, 46.6949888899517,
29.3780621124218, 11.3743525290235, 37.7195808156292, 62.6333126726666,
28.4692721123006, 17.0298455473048, 14.3098664643564, 17.7499631308564,
87.1393427315571, 60.3089055364667, 41.7849043662927, 87.2691684053224,
97.1454278187317, 53.9239973250175, 53.8018772046333, 57.751515546603,
27.3798478555643, 30.6642975040561, 48.4553170757953, 41.9759520786297,
33.3880134641802, 37.3807049759314, 49.8823206292369, 49.7792541871492,
61.821997105488, 40.2477260156321, 32.2363477179296, 43.918067054065,
89.6254564762497, 35.5927710501446, 27.6333379571774, 42.0554883840467,
45.4018421835631, 4.07647329598549, 52.945234942045, 44.2345694983538,
63.8855719530995, 37.3036925262838, 11.4985551858961, 47.6500054672646,
12.488428646998, 13.7372221770588, 24.4479793264376, 71.2384899552303,
52.9595905197645, 16.8213670893537, 37.0777367654005, 20.1344312201034,
24.7504557199489, 15.9504355215393, 4.4986704990778, 17.4471004003001,
9.04823098759565, 25.684547529165, 15.2396067965458, 13.9748972112566,
88.9846859415509, 15.1658523003296, 18.6262158018174, 8.95876566894735,
19.8247489326594, 20.4813444727095, 23.6721190072342, 14.4891642200285,
10.6402985988761, 10.1346051623741, 15.3824252473173, 17.5975390671566,
15.758052106193, 11.4810033780958, 25.1035007014738, 21.3402595089137,
28.5373345425722, 11.3907620234039, 7.18155005801645, 13.5078761535753,
14.0009018934227, 4.09891462242866, 9.47515101787348, 10.755798004242,
23.9344946865876, 36.4670348302756, 5.53642050027254, 18.2898185695699,
17.1906059877831, 17.5321948763862, 16.2784860139608)), row.names = c(NA,
-100L), class = c("data.table", "data.frame"))
更新于2020年9月10日
非常感谢您提出的解决方案。每个解决方案都非常有趣,如果可以的话,我会接受所有的解决方案。
解决方案1由ekoam提供 我真的很喜欢它只依赖于R中的基本包!这是一种有趣的方法,但我必须优化它才能将其应用于整个数据集。我会根据方位角变化划分整个路径,并在过滤器的不同部分上使用此算法并将它们连接在一起。如果我只考虑速度,这将是我选择的方法!
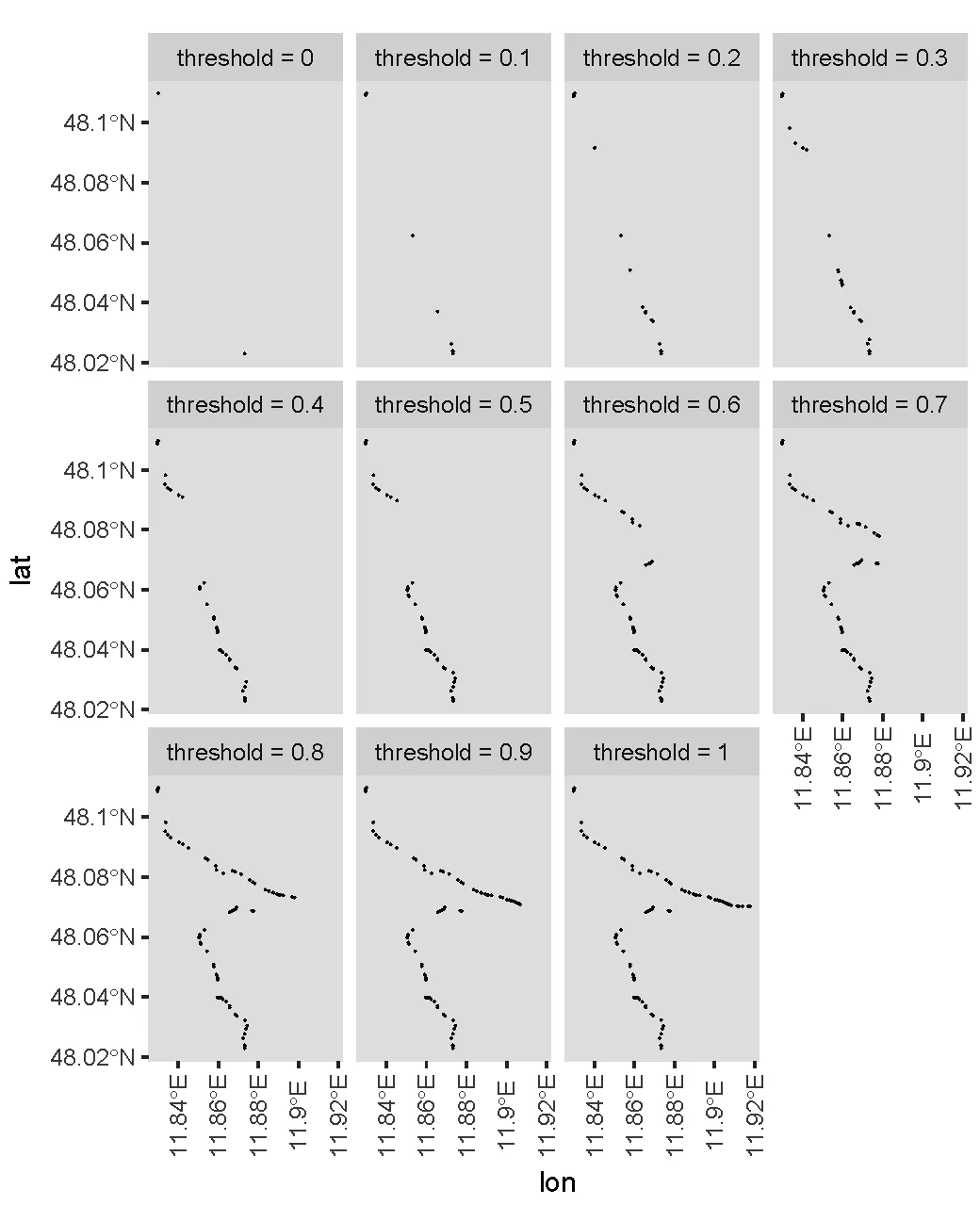
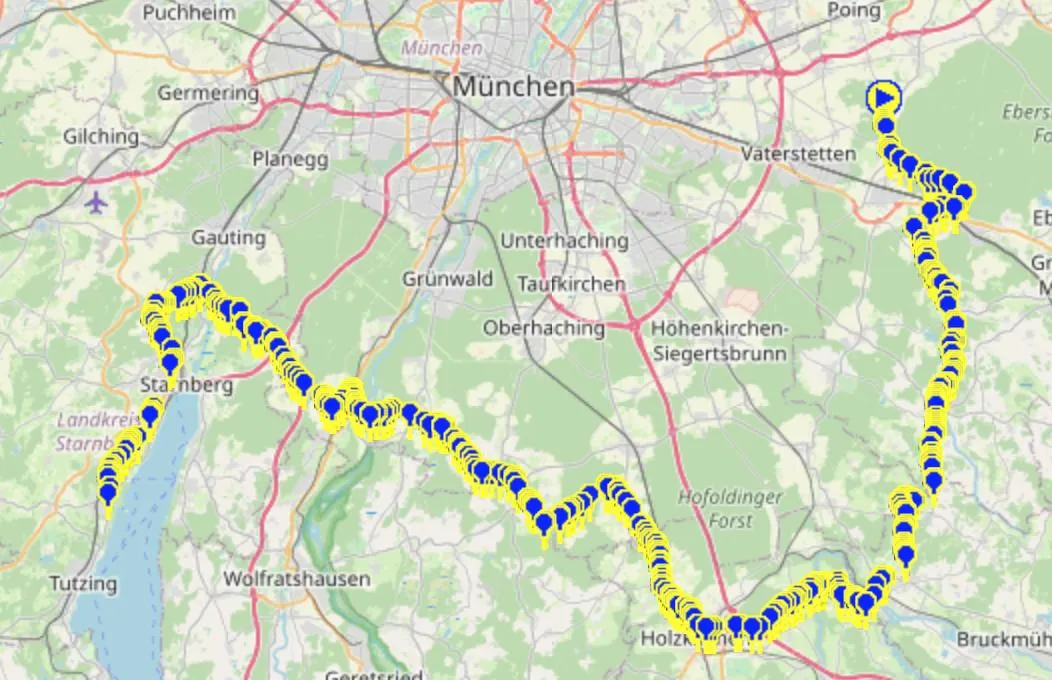
解决方案2由mrhellmann提供 这是一种非常有趣的方法,依赖于非常新鲜的专业软件包。与其他两种相比,它涉及更多的计算,并且产生的结果不如其他两种平滑。我将尝试使用这些软件包,并认为它们有很大的潜力!我调整了K的值,但无法根据绘图删除我想要删除的“尾巴”。
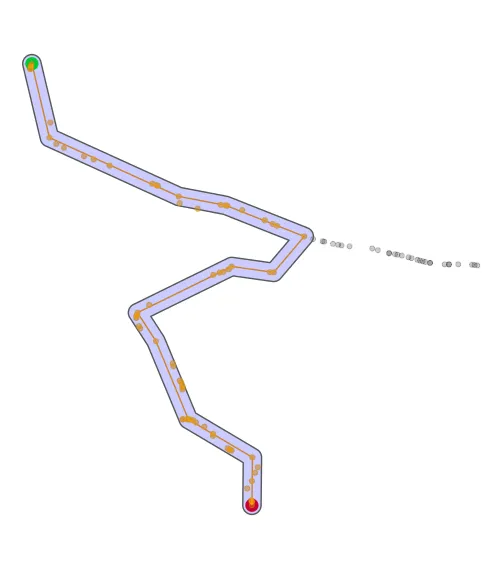
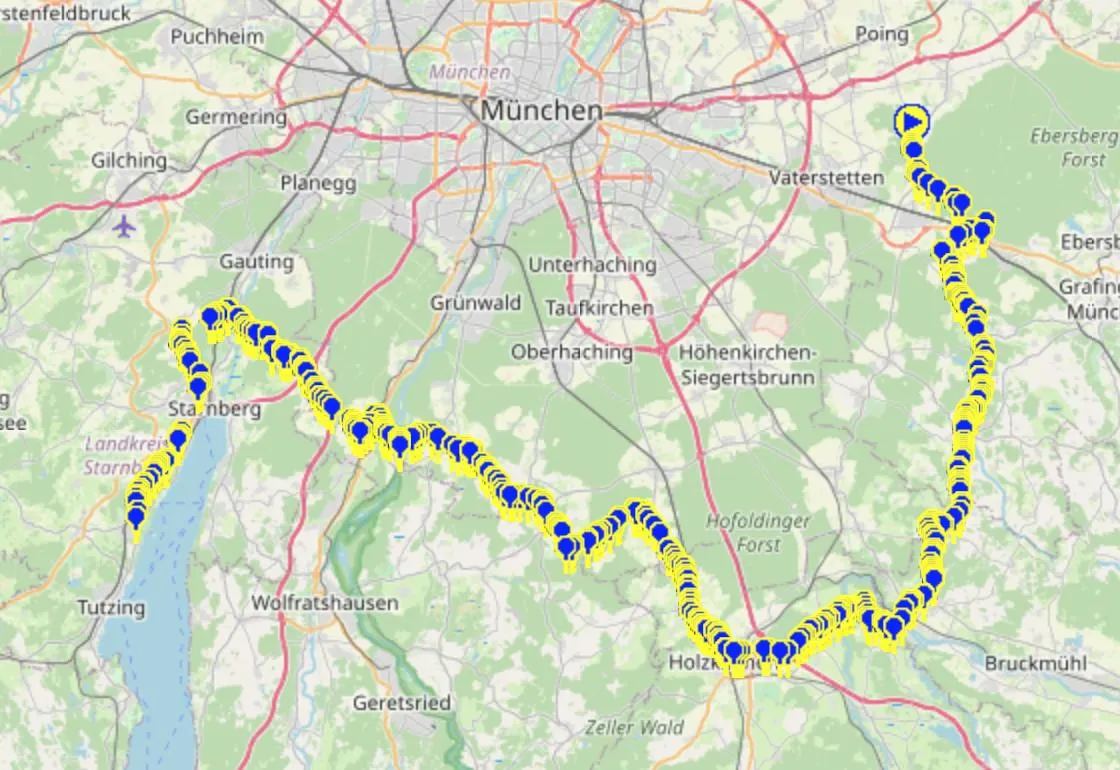
BrianLang的解决方案 Nr3 这个解决方案在整个数据集上立即产生了最好的结果,路径发生了突然变化。它的CPU消耗有点大,但是它可以直接使用而且它效果最好,这就是为什么我会选择这个解决方案作为对这个问题的回答。
非常感谢你们所花费的所有时间来回答这个问题。
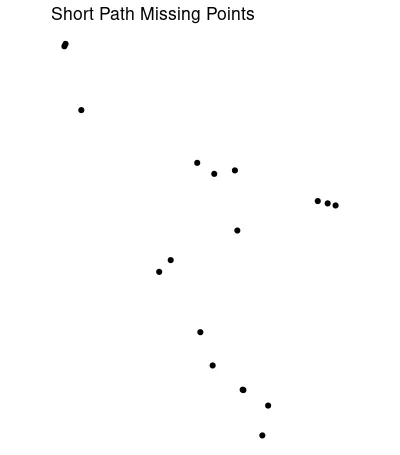
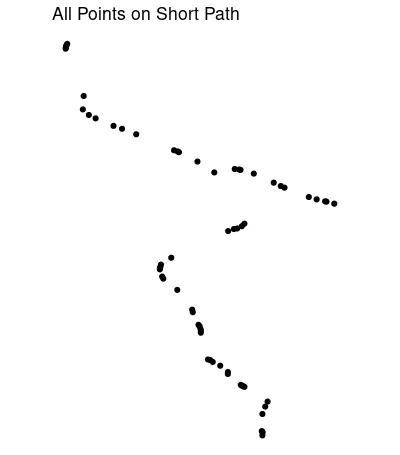
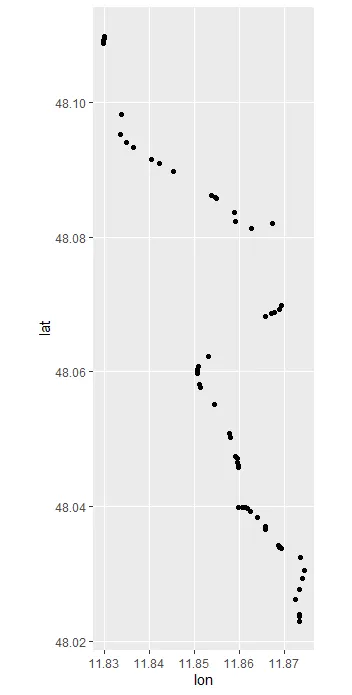
更新 09.10.2020 15:19 实际上,在mrhellmann和BrianLang的提议之间基本上没有区别。 mrhellmann的提议产生了轻微的平滑图形,因为它让其他点存在。 当前的差异是7点。
 相比之下,BrianLang的提议
相比之下,BrianLang的提议
mrhellmann提供的解决方案在637个点上运行需要约6秒。BrianLang提供的解决方案也需要6秒运行。
现在唯一的区别在于包的使用和优化的可能性。