我是一名有用的助手,可以为您翻译文本。
针对增强现实应用程序,我正在使用一些slam算法来预测我的手机的当前方向。
该算法(LSD-Slam)以SE3李群的形式提供当前姿态(使用Sophus::Sim3f)。如果我理解正确,这种类型包含一个可以解释为相机视图矩阵的矩阵。在初始化之后,例如,矩阵看起来像这样:
为了可视化3D内容,我使用OpenSceneGraph。幸运的是,在OSG中,您可以直接使用视图矩阵来设置相机位置:
针对增强现实应用程序,我正在使用一些slam算法来预测我的手机的当前方向。
该算法(LSD-Slam)以SE3李群的形式提供当前姿态(使用Sophus::Sim3f)。如果我理解正确,这种类型包含一个可以解释为相机视图矩阵的矩阵。在初始化之后,例如,矩阵看起来像这样:
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
为了可视化3D内容,我使用OpenSceneGraph。幸运的是,在OSG中,您可以直接使用视图矩阵来设置相机位置:
camera->setViewMatrix(matrix);
现在,当我运行代码时,如果我绕Y轴(横滚)或Z轴(偏航)旋转,似乎一切正常。但是当我绕X轴(俯仰)旋转时,我的OSG数字相机似乎与它应该做的完全相反。
例如:想象一个3D模型直接在相机前面。如果我缓慢地将相机向上倾斜(绕X轴),3D模型也会向上移动,而实际上它应该在屏幕底部离开。我尝试用以下图形说明这种行为: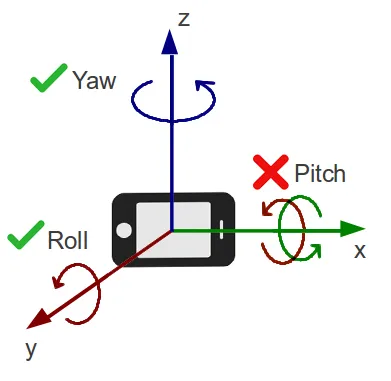
可能有一个非常简单的解决方案,但即使尝试了几个小时,我也无法解决。如果我理解正确,第一列代表围绕某个轴的旋转,所以我尝试反转单个向量,例如这样做:
u u u 0 -u u u 0 -u -u -u 0
v v v 0 => -v v v 0 ... v v v 0
n n n 0 -n n n 0 n n n 0
0 0 0 1 0 0 0 1 0 0 0 1
虽然一些尝试已经解决了音高问题,但他们却搞砸了另一个轴...似乎总有至少一个轴是错误的。有人知道我该如何解决这个问题吗? 我真的很感激任何关于这个问题的提示。