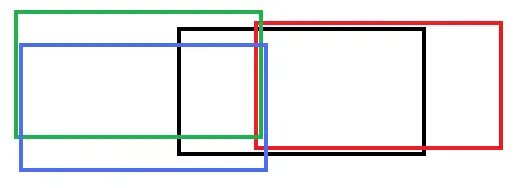
在这个问题中,r是一个固定的正整数。给定平面上N个大小相同的矩形,边缘只能是垂直或水平。我们假设所有N个矩形的交集面积为非零面积。问题是如何找到N-r个矩形,以最大化交集的面积。当人们反复成像某个生物标本时,由于物理原因(例如显微镜和相机的部件差异扩大),对齐会稍微发生变化,因此在实际显微镜中会出现这个问题。我已经将问题表述为维度d=2的情况。每个d>0都有一个类似的问题。对于d=1,通过排序间隔的左端点可以获得O(N log(N))的解决方案。但让我们坚持d=2。如果r=1,则可以通过对角线坐标进行排序以在O(N log(N))的时间内再次解决该问题。
所以,是否通过先解决情况(N,1)以获得N-1个矩形,然后解决情况(N-1,1),得到N-2个矩形,一直减少到N-r个矩形来解决原始问题?我希望看到这种乐观尝试程序的明确反例。如果该程序有效(请证明!),那将更有趣。
如果r固定为某个值r>1,而N很大,这个问题是否属于NP类之一?
谢谢任何关于此的想法。
David
所以,是否通过先解决情况(N,1)以获得N-1个矩形,然后解决情况(N-1,1),得到N-2个矩形,一直减少到N-r个矩形来解决原始问题?我希望看到这种乐观尝试程序的明确反例。如果该程序有效(请证明!),那将更有趣。
如果r固定为某个值r>1,而N很大,这个问题是否属于NP类之一?
谢谢任何关于此的想法。
David