Bentley-Ottmann算法在这种情况下并不好。
因为它只适用于需要计算线段交点的情况。
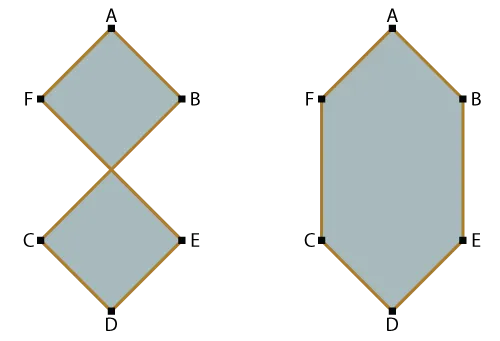
哈哈,我通过将自相交多边形转换为多个简单多边形来解决了计算自相交多边形的问题。
这是我的代码。
https://github.com/zslzz/intersection_polygon
class SdPolygon(object):
def __init__(self, points=None):
points = self.parafloat(points)
self.points = points
self.current_points = []
self.sd_polygons = []
self.gene_polygon()
from shapely.ops import cascaded_union
self.sd_polygon = cascaded_union(self.sd_polygons)
def parafloat(self, points):
"""
为保证准确,将所有的浮点数转化为整数
:return:
"""
para_point = [(int(x), int(y)) for x, y in points]
return para_point
def gene_polygon(self):
for point in self.points:
self.add_point_to_current(point)
p0 = Polygon(self.current_points)
self.sd_polygons.append(p0)
def add_point_to_current(self, point):
"""
将该点加入到current_points 中,倒序遍历current_points中的点,如果能围成多边形,则将所围成的点弹出
:param point:
:return:
"""
if len(self.current_points) < 2:
self.current_points.append(point)
return
cross_point_dict = {}
l0 = Line(Point(point[0], point[1]), Point(self.current_points[-1][0], self.current_points[-1][1]))
for i in range(0, len(self.current_points) - 1):
line = Line(Point(self.current_points[i][0], self.current_points[i][1]),
Point(self.current_points[i + 1][0], self.current_points[i + 1][1]))
cross_point = self.get_cross_point(l0, line)
if self.is_in_two_segment(cross_point, l0, line):
cross_point_dict.update({i: cross_point})
flag_dict = {}
cross_points_list = sorted(cross_point_dict.items(), key=lambda item: item[0], reverse=True)
for cross_point_info in cross_points_list:
cross_i, cross_point = cross_point_info[0], cross_point_info[1]
if flag_dict:
points = self.current_points[cross_i + 1:flag_dict['index'] + 1]
points.append((flag_dict['point'].x, flag_dict['point'].y))
points.append((cross_point.x, cross_point.y))
p = Polygon(points)
self.sd_polygons.append(p)
else:
points = self.current_points[cross_i + 1:]
points.append((cross_point.x, cross_point.y))
p = Polygon(points)
self.sd_polygons.append(p)
flag_dict.update(index=cross_i, point=cross_point)
if flag_dict:
point_list = self.current_points[:flag_dict['index'] + 1]
point_list.append((flag_dict['point'].x, flag_dict['point'].y))
self.current_points = point_list
self.current_points.append(point)
def is_in_segment(self, point, point1, point2):
"""
交点是否在线段上
:param point:(x,y)
:param point1:[(x1,y1),(x2,y2)]
:param point2:
:return:
"""
if point1.x > point2.x:
minx = point2.x
maxx = point1.x
else:
minx = point1.x
maxx = point2.x
if point1.y > point2.y:
miny = point2.y
maxy = point1.y
else:
miny = point1.y
maxy = point2.y
if minx <= point.x <= maxx and miny <= point.y <= maxy:
return True
return False
def is_in_two_segment(self, point, l1, l2):
"""
点 是否在两段 线段中间
:param point:
:param l1:
:param l2:
:return:
"""
def is_same_point(p1, p2):
"""
判断点是否相同
:param p1:
:param p2:
:return:
"""
if abs(p1.x - p2.x) < 0.1 and abs(p1.y - p2.y) < 0.1:
return True
return False
if self.is_in_segment(point, l1.p1, l1.p2) and self.is_in_segment(point, l2.p1, l2.p2):
if (is_same_point(point, l1.p1) or is_same_point(point, l1.p2)) and (
is_same_point(point, l2.p1) or is_same_point(point, l2.p2)):
return False
return True
return False
def get_line_para(self, line):
"""
规整line
:param line:
:return:
"""
line.a = line.p1.y - line.p2.y
line.b = line.p2.x - line.p1.x
line.c = line.p1.x * line.p2.y - line.p2.x * line.p1.y
def get_cross_point(self, l1, l2):
"""
得到交点
:param l1: 直线Line
:param l2:
:return: 交点坐标Point
"""
self.get_line_para(l1)
self.get_line_para(l2)
d = l1.a * l2.b - l2.a * l1.b
p = Point()
if d == 0:
return p
p.x = ((l1.b * l2.c - l2.b * l1.c) // d)
p.y = ((l1.c * l2.a - l2.c * l1.a) // d)
return p
0是正确答案 :) - ypercubeᵀᴹ