我希望使用C++算法和OpenCV4将单个全景鱼眼图像转换为等距全景图像。
想法来自于计算机上加载的输入图像,如下所示: 我想获得如下输出图像:
我想获得如下输出图像: 我正在使用此博客中描述的方法:
http://paulbourke.net/dome/dualfish2sphere/
该方法可以用以下图片描述:
我正在使用此博客中描述的方法:
http://paulbourke.net/dome/dualfish2sphere/
该方法可以用以下图片描述: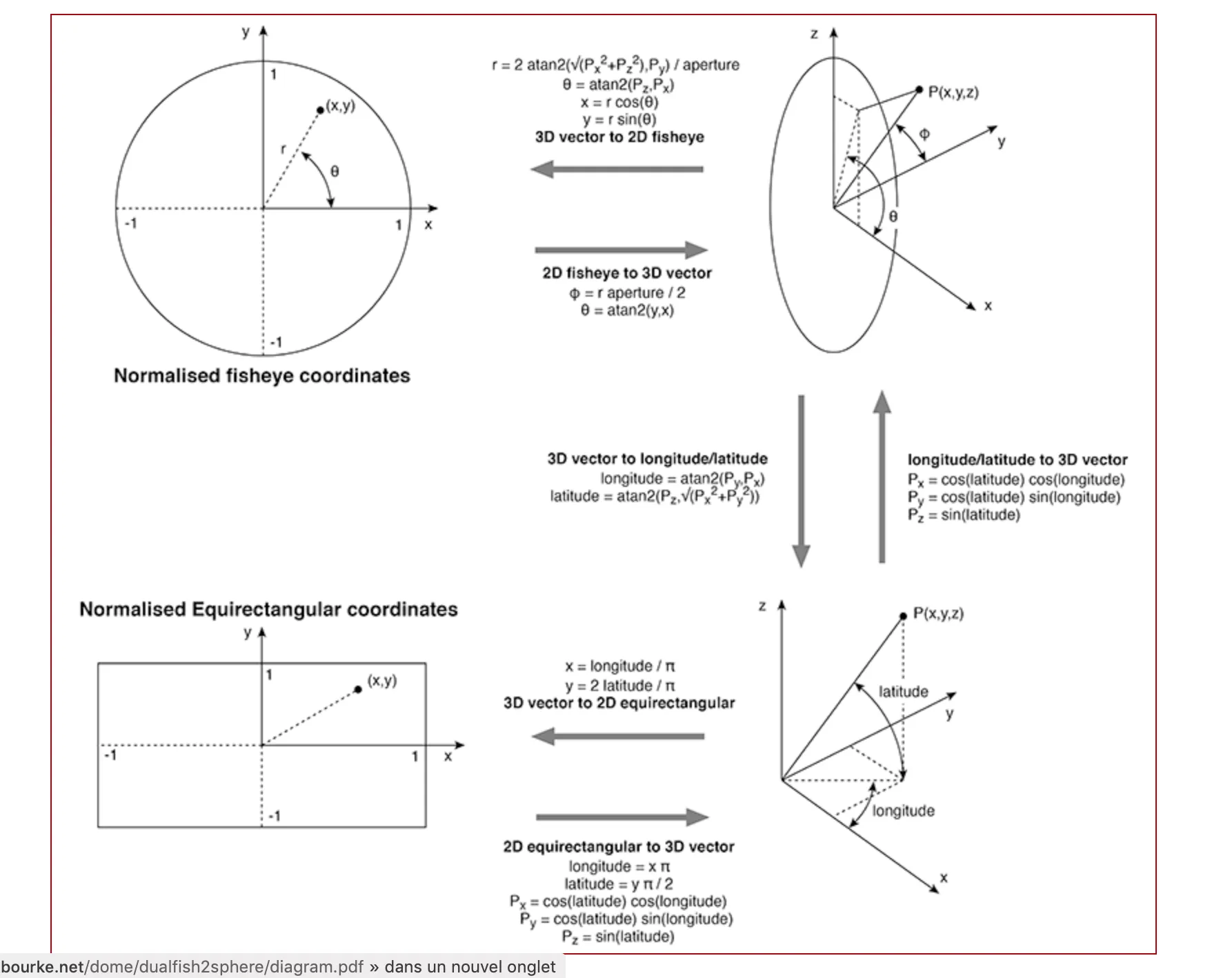 不幸的是,当我运行我的代码时,结果类似于这样:
不幸的是,当我运行我的代码时,结果类似于这样: 我在MacOSX上使用Xcode工具,并使用Terminal "ITerm2"构建和执行我的代码。
我在MacOSX上使用Xcode工具,并使用Terminal "ITerm2"构建和执行我的代码。
以下是我的代码:
想法来自于计算机上加载的输入图像,如下所示:
我想获得如下输出图像:
我正在使用此博客中描述的方法:
http://paulbourke.net/dome/dualfish2sphere/
该方法可以用以下图片描述:
不幸的是,当我运行我的代码时,结果类似于这样:
我在MacOSX上使用Xcode工具,并使用Terminal "ITerm2"构建和执行我的代码。以下是我的代码:
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
const double PI = 3.141592653589793;
const string PATH_IMAGE = "/Users/Kenza/Desktop/Xcode_cpp_opencv/PaulBourke2/PaulBourke2/Images/img1.jpg";
const int ESC = 27;
Point2f findCorrespondingFisheyePoint(int Xe, int Ye, double He, double We, double Hf, double Wf, double FOV){
Point2f fisheyePoint;
double Xfn, Yfn; //Normalized Cartesian Coordinates
double longitude, latitude, Px, Py, Pz; //Spherical Coordinates
double r, theta; //Polar coordinates
double Xpn, Ypn; //Normalized Polar coordinates
//Normalize Coordinates
Xfn = ( ( 2.0 * (double)Xe ) - We) / Wf;//Between -1 and 1
Yfn = ( ( 2.0 * (double)Ye ) - He) / Hf;//Between -1 and 1
//Normalize Coordinates to Spherical Coordinates
longitude = Xfn*PI; //Between -PI and PI (2*PI interval)
latitude = Yfn*(PI/2.0); //Between -PI/2 and PI/2 (PI interval)
Px = cos(latitude)*cos(longitude);
Py = cos(latitude)*sin(longitude);
Pz = sin(latitude);
//Spherical Coordinates to Polar Coordinates
r = 2.0 * atan2(sqrt(pow(Px,2)+pow(Pz,2)),Py)/FOV;
theta = atan2(Pz,-Px);
Xpn = r * cos(theta);
Ypn = r * sin(theta);
//Normalize Coordinates to CartesianImage Coordinates
fisheyePoint.x = (int)(((Xpn+1.0)*Wf)/2.0);
fisheyePoint.y = (int)(((Ypn+1.0)*Hf)/2.0);
return fisheyePoint;
}
int main(int argc, char** argv){
Mat fisheyeImage, equirectangularImage;
fisheyeImage = imread(PATH_IMAGE, CV_32FC1);
namedWindow("Fisheye Image", WINDOW_AUTOSIZE);
imshow("Fisheye Image", fisheyeImage);
while(waitKey(0) != ESC) {
//wait until the key ESC is pressed
}
//destroyWindow("Fisheye Image");
int Hf, Wf; //Height, width and FOV for the input image (=fisheyeImage)
double FOV;
int He, We; //Height and width for the outpout image (=EquirectangularImage)
Hf = fisheyeImage.size().height;
Wf = fisheyeImage.size().width;
FOV = PI; //FOV in radian
//We keep the same ratio for the image input and the image output
We = Wf;
He = Hf;
equirectangularImage.create(Hf, Wf, fisheyeImage.type()); //We create the outpout image (=EquirectangularImage)
//For each pixels of the ouput equirectangular Image
for (int Xe = 0; Xe <equirectangularImage.size().width; Xe++){
for (int Ye = 0; Ye <equirectangularImage.size().height; Ye++){
equirectangularImage.at<Vec3b>(Point(Xe,Ye)) = fisheyeImage.at<Vec3b>(findCorrespondingFisheyePoint(Xe, Ye, He, We, Hf, Wf, FOV)); //We find the corresponding point in the fisheyeImage
}
}
namedWindow("Equirectangular Image", WINDOW_AUTOSIZE);
imshow("Equirectangular Image",equirectangularImage);
while(waitKey(0) != ESC) {
//wait until the key ESC is pressed
}
destroyWindow("Fisheye Image");
imwrite("equirectangularImage.jpg", equirectangularImage);
return 0;
}