以下问题是我从一门人工智能课程中找到的考试练习题目。
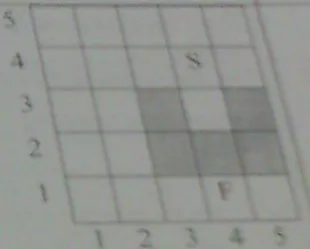
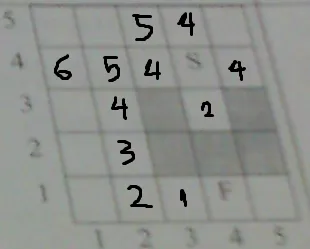
很明显,使用曼哈顿距离,机器人的下一步移动将会在(3,4),因为它具有启发式值2 - HC将选择该点并永远卡住。我们的目标是通过找到合适的启发式算法,尽可能避免走这条路。