我有点喜欢三角学,所以我知道将角度映射到我们通常拥有的一些值的最佳方法是正切。当然,如果我们想要一个有限的数字,以免比较{sign(x),y/x}的麻烦,这会变得更加混乱。
但是有一个函数,它将[1,+inf[映射到[1,0[,称为反函数,它将允许我们有一个有限的范围来映射角度。正切的反函数是众所周知的余切,因此x/y(是的,就这么简单)。
下面是一个小插图,显示了在单位圆上正切和余切的值:
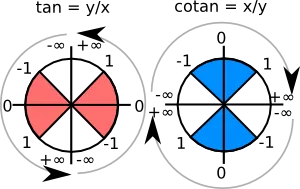
当|x| = |y|时,您会看到值相同,而且如果我们在两个圆上输出[-1,1]之间的值,则可以看到已经涂满一个圆。为了使这些值的映射连续且单调,我们可以这样做:
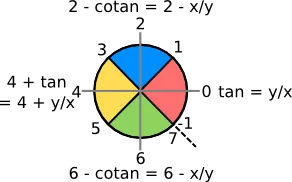
- 使用余切的相反数以获得与正切相同的单调性
- 将-余切加2,以使值在tan=1处重合
- 添加4到圆的一半(例如,x=-y对角线下方)以使值适合于不连续点之一。
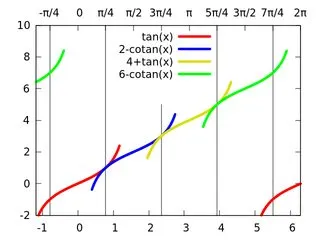
这给出了以下分段函数,它是角度的连续且单调的函数,只有一个不连续点(即最小值):
double pseudoangle(double dx, double dy)
{
int diag = dx > dy;
int adiag = dx > -dy;
double r = !adiag ? 4 : 0;
if (dy == 0)
return r;
if (diag ^ adiag)
r += 2 - dx / dy;
else
r += dy / dx;
return r;
}
请注意,这非常接近
Fowler angles,具有相同的属性。形式上,
pseudoangle(dx,dy) + 1 % 8 == Fowler(dx,dy)
谈到性能,它比Fowler的代码少得多(在我看来通常也不太复杂)。在gcc 6.1.1上使用
-O3编译,上述函数生成带有4个分支的汇编代码,其中两个来自
dy == 0(一个检查是否两个操作数都是“无序”的,因此如果dy是
NaN,另一个则检查它们是否相等)。
我认为这个版本比其他版本更精确,因为它仅使用保持尾数的操作,直到将结果移动到正确的区间。当|x| << |y|或|y| >> |x|时,这应该特别明显,然后操作|x| + |y|会失去相当多的精度。
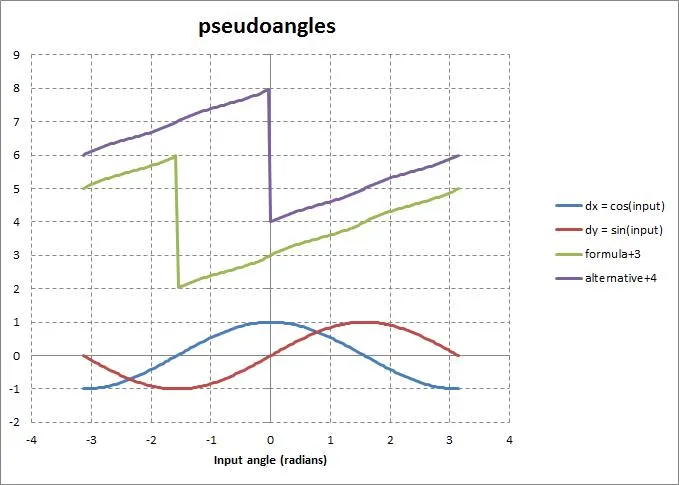
正如您在图表上所看到的,角度-伪角关系也非常接近线性。
看一下分支的来源,我们可以得出以下观察:
如果我们选择获得大致相同的结果(最多存在舍入误差),但没有分支,我们可以滥用copysign并编写:
double pseudoangle(double dx, double dy)
{
double s = dx + dy;
double d = dx - dy;
double r = 2 * (1.0 - copysign(1.0, s));
double xor_sign = copysign(1.0, d) * copysign(1.0, s);
r += (1.0 - xor_sign);
r += (s - xor_sign * d) / (d + xor_sign * s);
return r;
}
由于dx和dy在绝对值上接近,因此可能会发生比以前的实现更大的错误,由于d或s中的取消。与其他实现相比,没有检查除零,因为只有当dx和dy都为0时才会发生这种情况。