我正在处理图像处理项目。我使用Opencv2.3.1和VC++。我已经编写了代码以便将输入图像过滤为只有蓝色,并转换为二进制图像。二进制图像中有一些小物体,我不需要它们。我想要消除这些小物体,所以我使用了openCV的
所以请有人帮我解决这个问题... 我获得的二进制图像: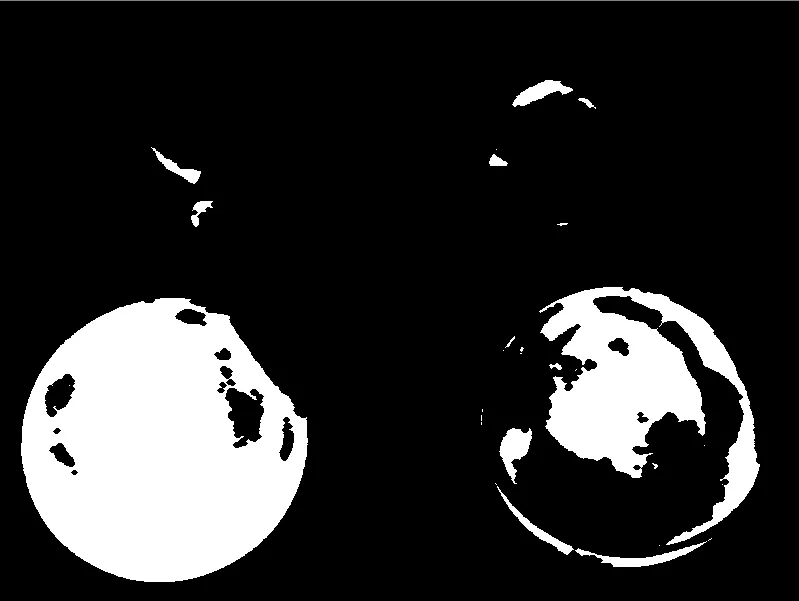 我想要获得的结果/输出图像:
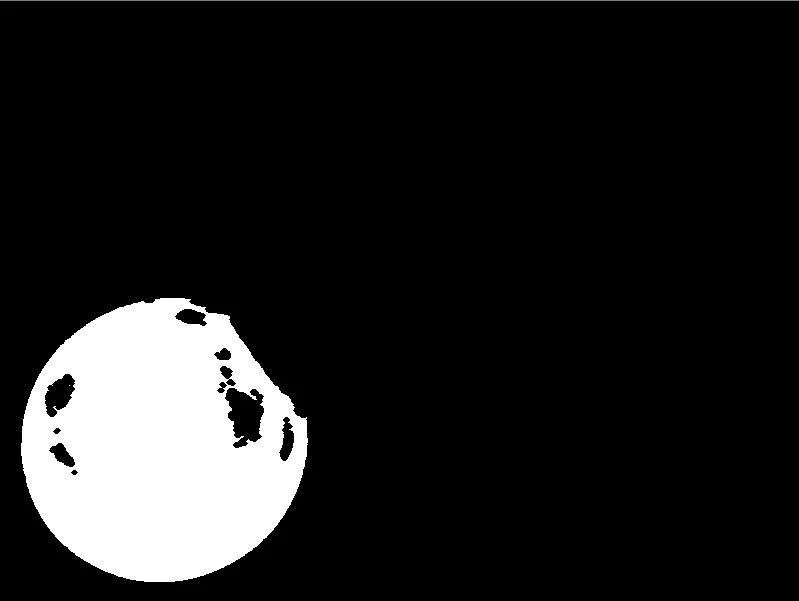
我想要获得的结果/输出图像:
cvFindContours() 方法来检测二进制图像中的轮廓。但是问题是我无法消除图像输出中的小物体。我使用了cvContourArea()函数,但没有正常工作...腐蚀函数也没有正常工作。所以请有人帮我解决这个问题... 我获得的二进制图像:
我想要获得的结果/输出图像: