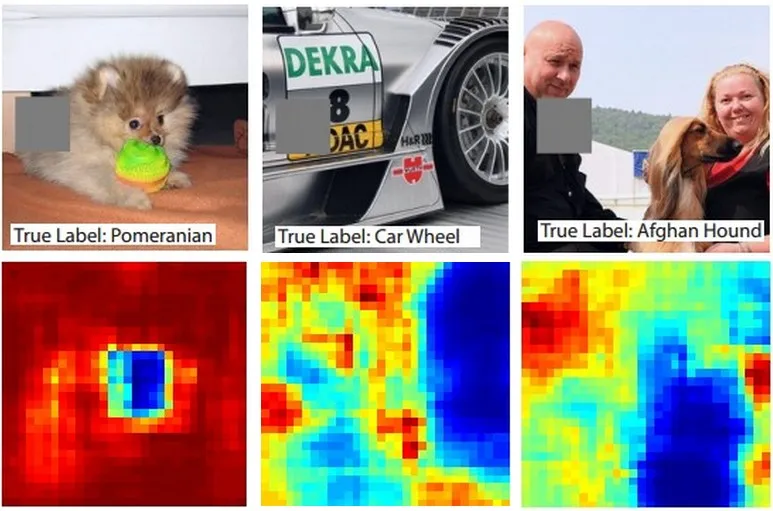
我正在设计用于城市特征检测的深度CNN分类器。我的网络大部分时间可以正确地对建筑进行分类和分割,但有时会因为照明/外观相似等原因与其他物体混淆。
我想创建一个彩色地图,以及能够表示分类器置信度的分割图像。我已经使用softmaxwith loss来训练网络。
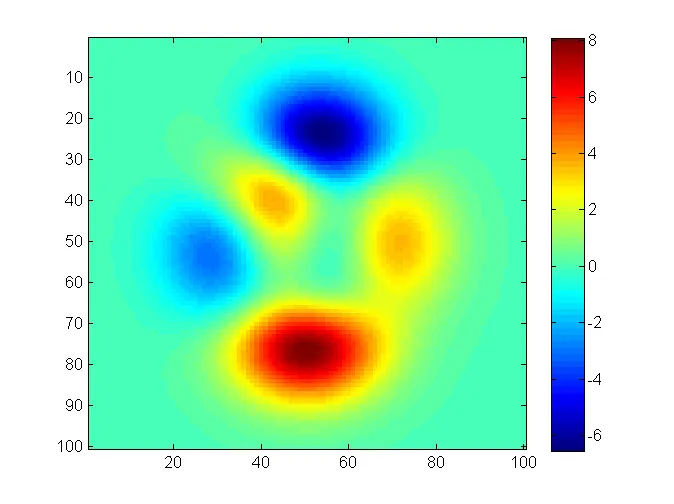
我希望得到类似于这张颜色映射图像的输出:
我想创建一个彩色地图,以及能够表示分类器置信度的分割图像。我已经使用softmaxwith loss来训练网络。
layer {
name: "score"
type: "Deconvolution"
bottom: "pool_3"
top: "score"
convolution_param {
num_output: 2
bias_term: false
pad:2
kernel_size: 8
stride: 4
}
}
我希望得到类似于这张颜色映射图像的输出:
我的问题是
- 如何计算不确定度?
- 在计算不确定度时如何处理负值?
注意:目前,我能够使用熵得到颜色地图。