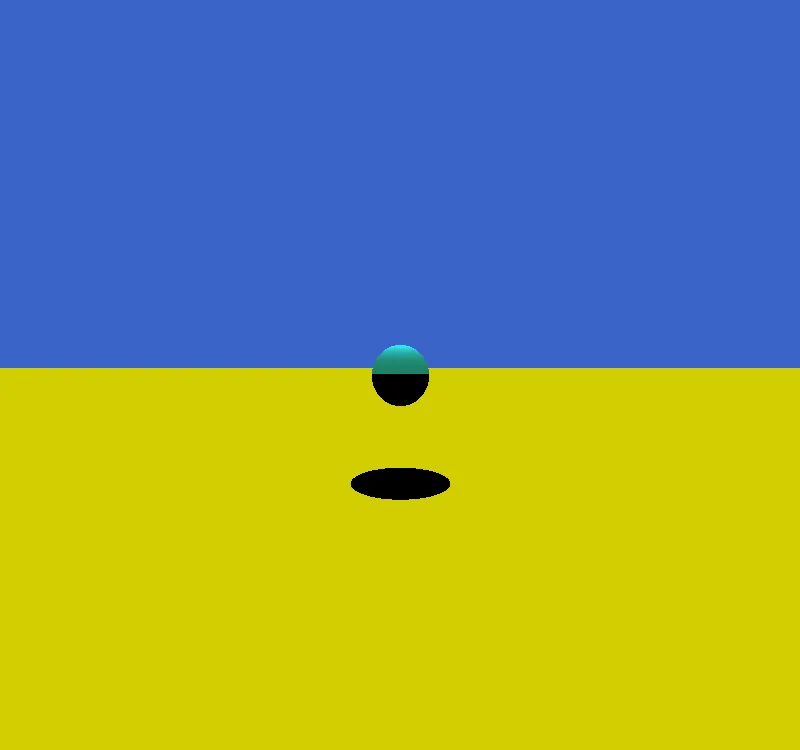
我正在开发一个光线追踪器,但是在阴影部分卡了好几天。我的阴影效果非常奇怪。下面是光线追踪器的一张图片:
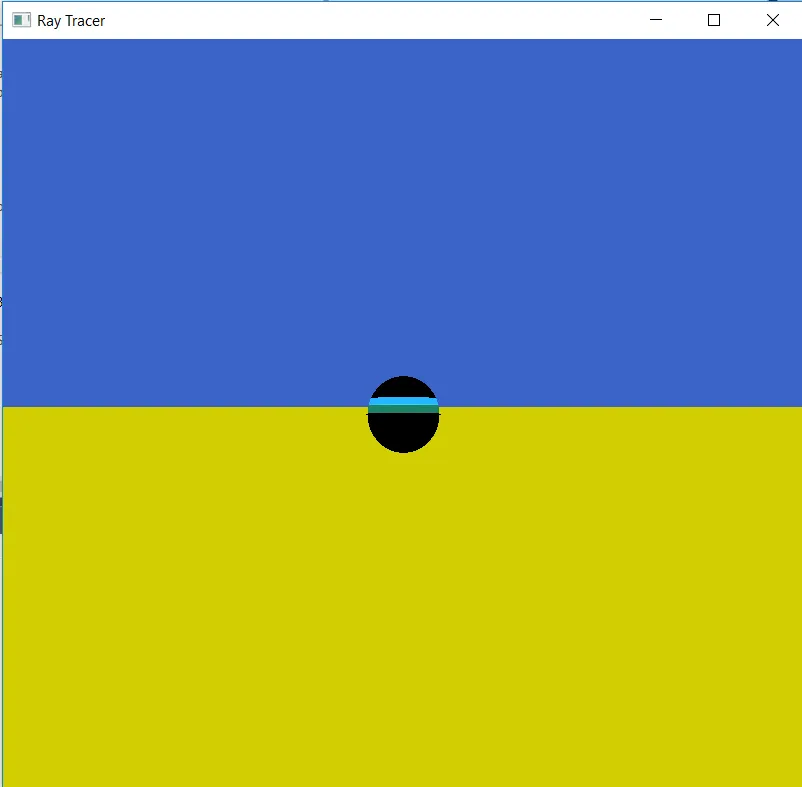
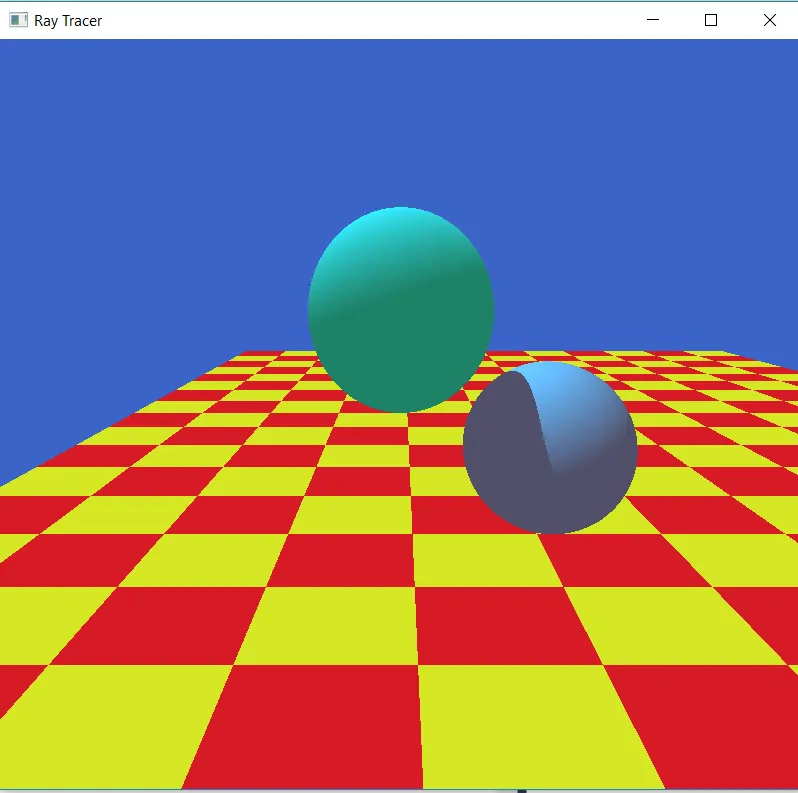
光线的起点始终为(0.f, -10.f, -500.f),因为这是透视投影,也是相机的位置。当光线与平面相交时,交点始终为光线的起点,但对于球体则不同。这是因为它基于球体的位置。由于原点差异很大,平面和球体之间永远没有交点。我还尝试在盒子上添加阴影,但这也行不通。然而,在两个球之间的阴影确实有效!
如果有人想看交点代码,请告诉我。
感谢您抽出时间来帮助我!
相机
Camera::Camera(float a_fFov, const Dimension& a_viewDimension, vec3 a_v3Eye, vec3 a_v3Center, vec3 a_v3Up) :
m_fFov(a_fFov),
m_viewDimension(a_viewDimension),
m_v3Eye(a_v3Eye),
m_v3Center(a_v3Center),
m_v3Up(a_v3Up)
{
// Calculate the x, y and z axis
vec3 v3ViewDirection = (m_v3Eye - m_v3Center).normalize();
vec3 v3U = m_v3Up.cross(v3ViewDirection).normalize();
vec3 v3V = v3ViewDirection.cross(v3U);
// Calculate the aspect ratio of the screen
float fAspectRatio = static_cast<float>(m_viewDimension.m_iHeight) /
static_cast<float>(m_viewDimension.m_iWidth);
float fViewPlaneHalfWidth = tanf(m_fFov / 2.f);
float fViewPlaneHalfHeight = fAspectRatio * fViewPlaneHalfWidth;
// The bottom left of the plane
m_v3ViewPlaneBottomLeft = m_v3Center - v3V * fViewPlaneHalfHeight - v3U * fViewPlaneHalfWidth;
// The amount we need to increment to get the direction. The width and height are based on the field of view.
m_v3IncrementX = (v3U * 2.f * fViewPlaneHalfWidth);
m_v3IncrementY = (v3V * 2.f * fViewPlaneHalfHeight);
}
Camera::~Camera()
{
}
const Ray Camera::GetCameraRay(float iPixelX, float iPixelY) const
{
vec3 v3Target = m_v3ViewPlaneBottomLeft + m_v3IncrementX * iPixelX + m_v3IncrementY * iPixelY;
vec3 v3Direction = (v3Target - m_v3Eye).normalize();
return Ray(m_v3Eye, v3Direction);
}
相机设置
Scene::Scene(const Dimension& a_Dimension) :
m_Camera(1.22173f, a_Dimension, vec3(0.f, -10.f, -500.f), vec3(0.f, 0.f, 0.f), vec3(0.f, 1.f, 0.f))
{
// Setup sky light
Color ambientLightColor(0.2f, 0.1f, 0.1f);
m_AmbientLight = new AmbientLight(0.1f, ambientLightColor);
// Setup shapes
CreateShapes();
// Setup lights
CreateLights();
// Setup buas
m_fBias = 1.f;
}
场景对象
Sphere* sphere2 = new Sphere();
sphere2->SetRadius(50.f);
sphere2->SetCenter(vec3(0.f, 0.f, 0.f));
sphere2->SetMaterial(matte3);
Plane* plane = new Plane(true);
plane->SetNormal(vec3(0.f, 1.f, 0.f));
plane->SetPoint(vec3(0.f, 0.f, 0.f));
plane->SetMaterial(matte1);
场景灯
PointLight* pointLight1 = new PointLight(1.f, Color(0.1f, 0.5f, 0.7f), vec3(0.f, -200.f, 0.f), 1.f, 0.09f, 0.032f);
阴影函数
for (const Light* light : a_Lights) {
vec3 v3LightDirection = (light->m_v3Position - a_Contact.m_v3Hitpoint).normalized();
light->CalcDiffuseLight(a_Contact.m_v3Point, a_Contact.m_v3Normal, m_fKd, lightColor);
Ray lightRay(a_Contact.m_v3Point + a_Contact.m_v3Normal * a_fBias, v3LightDirection);
bool test = a_RayTracer.ShadowTrace(lightRay, a_Shapes);
vec3 normTest = a_Contact.m_v3Normal;
float test2 = normTest.dot(v3LightDirection);
// No shadow
if (!test) {
a_ResultColor += lightColor * !test * test2;
}
else {
a_ResultColor = Color(); // Test code - change color to black.
}
}