我在我的STM32F446RE / NUCLEO-F446RE上使用定时器TIM3的正交编码器模式时遇到了问题:
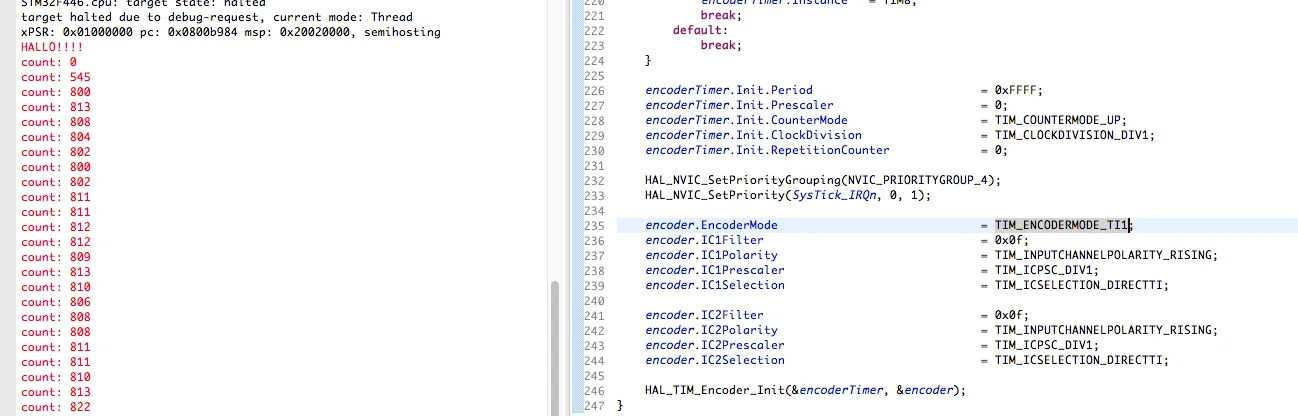
TIM3在第一个信号上的每个上升沿计数。
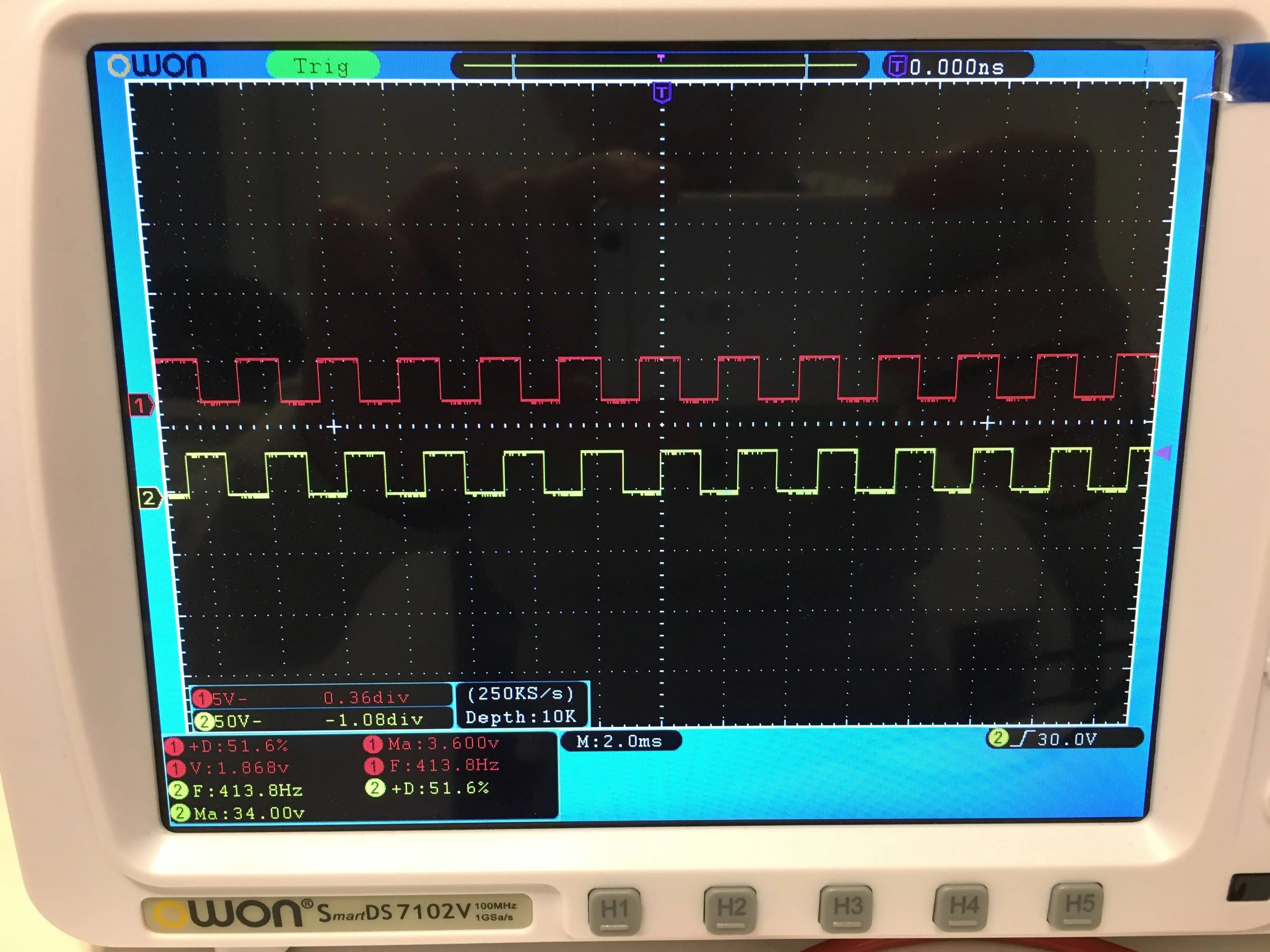
CNT寄存器计数并以1Hz读取该值,然后将寄存器设置为0。当我查看示波器oscilloscope时, 频率是CNT register output (1hz)值的一半。
为什么?
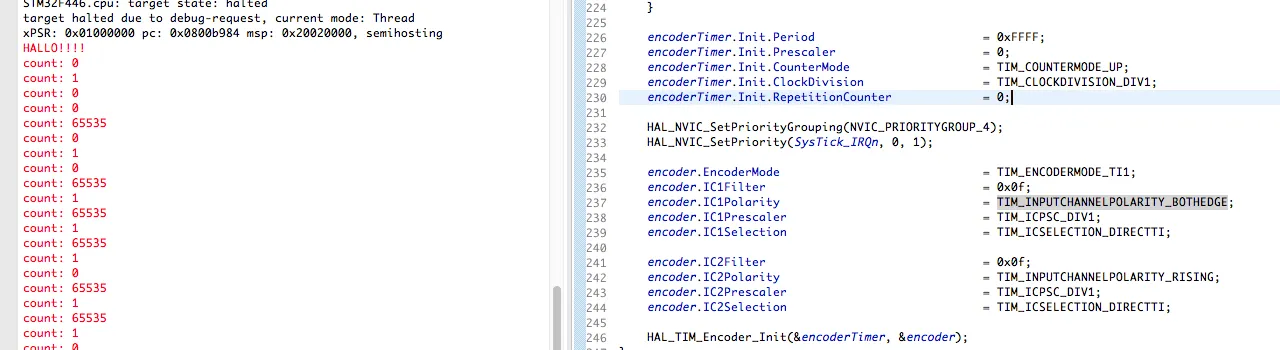
TIM3在第一个信号的两个边缘上计数。 CNT register output (1 Hz)完全错误。
{kind=link}
{kind=link}
{kind=link}
我的配置是:
GPIO_InitTypeDef sInitEncoderPin1;
sInitEncoderPin1.Pin = pin1Encoder.pin; // A GPIO_PIN_6
sInitEncoderPin1.Mode = GPIO_MODE_AF_PP;
sInitEncoderPin1.Pull = GPIO_PULLUP;
sInitEncoderPin1.Speed = GPIO_SPEED_HIGH;
sInitEncoderPin1.Alternate = altFunctionEncoder; // GPIO_AF2_TIM3
GPIO_InitTypeDef sInitEncoderPin2;
sInitEncoderPin2.Pin = pin2Encoder.pin; // A GPIO_PIN_7
sInitEncoderPin2.Mode = GPIO_MODE_AF_PP;
sInitEncoderPin2.Pull = GPIO_PULLUP;
sInitEncoderPin2.Speed = GPIO_SPEED_HIGH;
sInitEncoderPin2.Alternate = altFunctionEncoder; // GPIO_AF2_TIM3
HAL_GPIO_Init(GPIOA, &sInitEncoderPin1);
HAL_GPIO_Init(GPIOA, &sInitEncoderPin2);
encoderTimer.Init.Period = 0xffff;
encoderTimer.Init.Prescaler = 0;
encoderTimer.Init.CounterMode = TIM_COUNTERMODE_UP;
encoderTimer.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
encoderTimer.Init.RepetitionCounter = 0;
HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4);
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 1);
encoder.EncoderMode = TIM_ENCODERMODE_TI1;
encoder.IC1Filter = 0x0f;
encoder.IC1Polarity = TIM_INPUTCHANNELPOLARITY_RISING; // TIM_INPUTCHANNELPOLARITY_BOTHEDGE
encoder.IC1Prescaler = TIM_ICPSC_DIV1;
encoder.IC1Selection = TIM_ICSELECTION_DIRECTTI;
encoder.IC2Filter = 0x0f;
encoder.IC2Polarity = TIM_INPUTCHANNELPOLARITY_RISING;
encoder.IC2Prescaler = TIM_ICPSC_DIV1;
encoder.IC2Selection = TIM_ICSELECTION_DIRECTTI;
HAL_TIM_Encoder_Init(&encoderTimer, &encoder);
HAL_TIM_Encoder_Start_IT(&encoderTimer, TIM_CHANNEL_ALL);