我正在尝试使用GLM中实现的四元数来旋转一个点。最终目标是使用这段代码创建轨道相机,但这只是一个辅助说明代码背后的动机。
为了更好地理解基于四元数的旋转,我编写了一些包含两个循环的代码。第一个循环将通过绕X轴旋转步骤逐渐改变四元数的方向,直到90度;第二个循环将继续在Z轴周围以步骤方式应用旋转,直到90度。每个循环执行4个步骤。因此,每个循环分别围绕它们各自的轴增量旋转90/4 = 22.5度。使用四元数乘法应用方向变化,并使用欧拉角跟踪。循环应以一个四元数结束,该四元数将把点(0, 0, 3)旋转到(3, 0, 0)。请注意,我不仅仅想确定将执行此旋转的四元数。目标是执行一系列增量旋转。
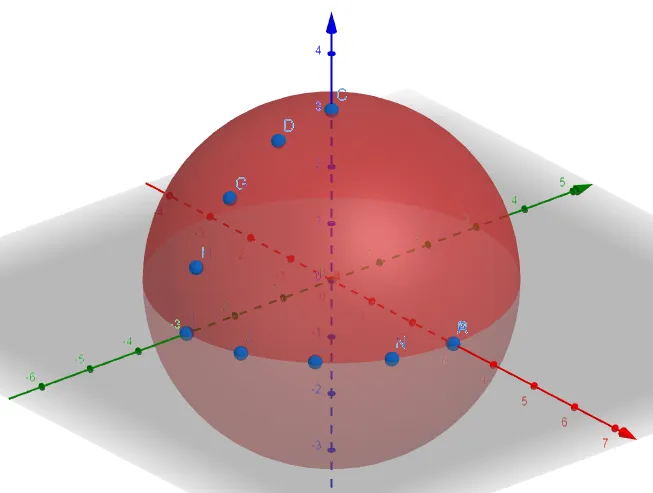
如果我们看下面的图片,从C到I的过渡发生在第一个循环中,然后从I到R的过渡发生在第二个循环中(请原谅稀疏的点命名)。
根据 this,由于我们只是围绕X轴纯粹旋转,因此可以通过对四元数的w分量执行acos来验证GLM计算的四元数的旋转量:
然后:
这是所需角度的一半...在与交互式动画进行交叉验证时也得到了确认(对舍入表示歉意)。
我得到了我期望的结果。重点是正确地遵循所有中间步骤,并从(0,0,3)到达(3,0,0)。此外,在所有中间步骤中,w分量均为0。
但是,如果我使用“正确的”旋转形式,并通过左手乘以q和右手乘以q的逆来旋转该点(为了解决旋转加倍的问题而进行半步旋转,角度为11.25度):
为了更好地理解基于四元数的旋转,我编写了一些包含两个循环的代码。第一个循环将通过绕X轴旋转步骤逐渐改变四元数的方向,直到90度;第二个循环将继续在Z轴周围以步骤方式应用旋转,直到90度。每个循环执行4个步骤。因此,每个循环分别围绕它们各自的轴增量旋转90/4 = 22.5度。使用四元数乘法应用方向变化,并使用欧拉角跟踪。循环应以一个四元数结束,该四元数将把点(0, 0, 3)旋转到(3, 0, 0)。请注意,我不仅仅想确定将执行此旋转的四元数。目标是执行一系列增量旋转。
如果我们看下面的图片,从C到I的过渡发生在第一个循环中,然后从I到R的过渡发生在第二个循环中(请原谅稀疏的点命名)。
v' = q * v * q^-1
在这里,v应被视为一个纯四元数(其标量项w为零),而q需要是长度为1的单位四元数。据我所知,需要用四元数的逆进行右手乘法,以保持结果v'在三维空间中,并且不会得到一个4D向量。因此,v'也需要是一个纯四元数。
然后是旋转的加倍效应,左手乘法与q贡献了所需旋转的一半,右手乘法与逆元素添加了所需旋转的另一半。
这里有一个由Ben Eater和Grant Sanderson提供的出色交互式可视化和四元数解释,我将其用作交叉参考。它可以在这里找到。
因此,我们首先需要使用绕X轴旋转11.25度的四元数,GLM为欧拉角返回了此四元数(使用四元数表示[w,[x,y,z]]):
Rotation of [ 11.25, 0.00, 0.00] deg => Q: [ 0.9952, [ 0.0980, 0.0000, 0.0000]]
根据 this,由于我们只是围绕X轴纯粹旋转,因此可以通过对四元数的w分量执行acos来验证GLM计算的四元数的旋转量:
float angle = acosf(q.w)
然后:
acos(0.9952) = 0.0980 rad / 5.6 degrees
这是所需角度的一半...在与交互式动画进行交叉验证时也得到了确认(对舍入表示歉意)。


template <typename T, precision P>
GLM_FUNC_QUALIFIER tquat<T, P>::tquat(tvec3<T, P> const & eulerAngle)
{
tvec3<T, P> c = glm::cos(eulerAngle * T(0.5));
tvec3<T, P> s = glm::sin(eulerAngle * T(0.5));
this->w = c.x * c.y * c.z + s.x * s.y * s.z;
this->x = s.x * c.y * c.z - c.x * s.y * s.z;
this->y = c.x * s.y * c.z + s.x * c.y * s.z;
this->z = c.x * c.y * s.z - s.x * s.y * c.z;
}
我的第一个问题是为什么GLM要将角度减半?
尽管所需旋转角度不同,我还是进行了两个循环的旋转结果检查。而结果是...出乎意料。
如果我使用“不正确的”旋转形式(一些OpenGL在线教程建议的形式)并且仅通过左手乘法旋转点(但为22.5度的完整步骤):
v' = q * v
我得到了我期望的结果。重点是正确地遵循所有中间步骤,并从(0,0,3)到达(3,0,0)。此外,在所有中间步骤中,w分量均为0。
但是,如果我使用“正确的”旋转形式,并通过左手乘以q和右手乘以q的逆来旋转该点(为了解决旋转加倍的问题而进行半步旋转,角度为11.25度):
v' = q * v * q^-1
当第二个循环开始绕Z轴旋转点时,我开始得到错误的结果。一个小但明显的Z分量开始悄悄地出现,旋转仅短了22.5度的全步骤。这在下面图像中的绿色点中可见。
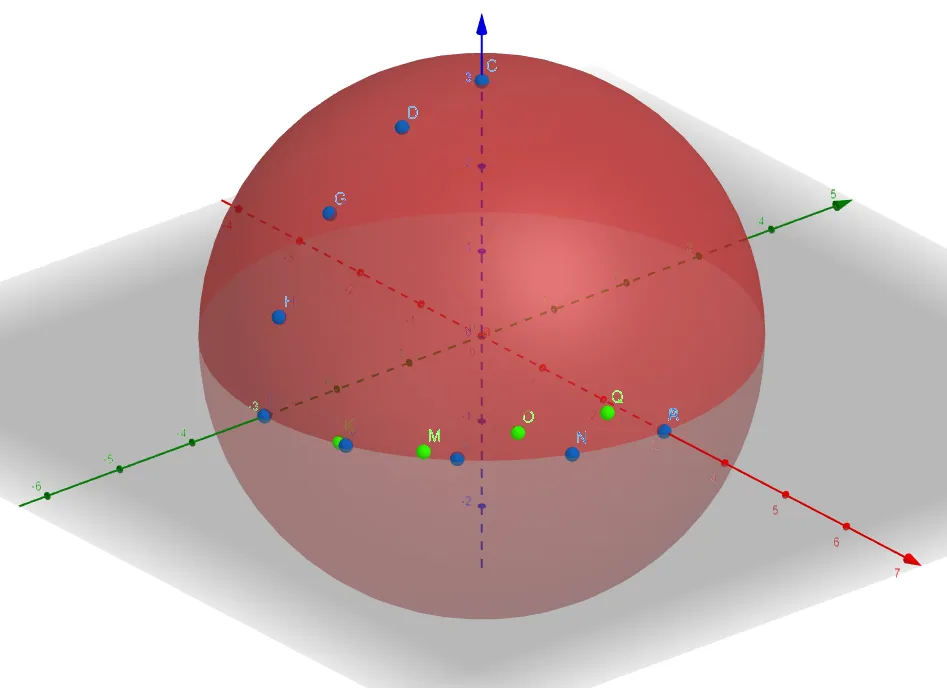
对于旋转的两种方法,旋转点的w分量保持为0...
有人能解释一下为什么使用GLM旋转可以通过单个左乘获得正确结果吗?
这是一种将操作次数减少到最少的优化吗?
我能否在GLM中使用v' = q * v旋转以获得所有旋转的一致和正确结果?
代码:
const int rotSteps = 4;
// Rotate around X axis in steps to 90deg
vec3 eulerState = vec3(0.0f);
// point we want to rotate (use vec4 to track the w component during rotations)
vec4 v = vec4(0.0f, 0.0f, 3.0f, 0.0f);
// Full Euler steps for q * v rotation
quat orientF = quat(1.0f, 0.0f, 0.0f, 0.0f);
vec3 euler = vec3(RAD(90.0f), RAD(0.0f), RAD(0.0f));
vec3 eulerStep = euler / (float)rotSteps;
quat qEulerF = quat(eulerStep); // GetRotQuat(eulerStep);
vec4 qa = ToAngularForm(qEulerF);
vec3 orientEuler = eulerAngles(qEulerF);
CLogD(TAG, "Rot Full Step Q [W, X, Y, Z]: " FMT_Q(4) " / " FMT_V3(2) "deg / " FMT_QA(2), PAR_Q(qEulerF), PAR_V3(degrees(orientEuler)), PAR_QA(qa));
// Half Euler steps for q * v * q^-1 rotation
quat orientH = quat(1.0f, 0.0f, 0.0f, 0.0f);
vec3 eulerStepH = eulerStep / 2.0f;
quat qEulerH = quat(eulerStepH); // GetRotQuat(eulerStepH);
qa = ToAngularForm(qEulerH);
orientEuler = eulerAngles(qEulerH);
CLogD(TAG, "Rot Half Step Q [W, X, Y, Z]: " FMT_Q(4) " / " FMT_V3(2) "deg / " FMT_QA(2), PAR_Q(qEulerH), PAR_V3(degrees(orientEuler)), PAR_QA(qa));
quat qEulerHI = inverse(qEulerH);
vec4 qai = ToAngularForm(qEulerHI);
orientEuler = eulerAngles(qEulerHI);
CLogD(TAG, "Rot Half Step Q^-1 [W, X, Y, Z]: " FMT_Q(4) " / " FMT_V3(2) "deg / " FMT_QA(2), PAR_Q(qEulerHI), PAR_V3(degrees(orientEuler)), PAR_QA(qai));
for (int rotStep = 1; rotStep <= rotSteps; ++rotStep)
{
// Track the absolute Euler rotation
eulerState += eulerStep;
// Rotate by incremental rotation as defined by Euler angles
orientH = qEulerH * orientH;
orientEuler = eulerAngles(orientH);
CLogI(TAG, "Rot Step %d. Curr Abs Q: " FMT_Q(4) "/" FMT_V3(2) "deg, Abs Euler: " FMT_V3(2) "deg",
rotStep, PAR_Q(orientH), PAR_V3(degrees(orientEuler)), PAR_V3(degrees(eulerState)));
// Transform the point using the correct q * v * q^-1 rotation and multiply from Left and Right
quat orientHI = inverse(orientH);
qa = ToAngularForm(orientH);
qai = ToAngularForm(orientHI);
vec4 rotV = orientH * v * orientHI;
CLogD(TAG, "Rot QL: " FMT_Q(4) " / " FMT_QA(1), PAR_Q(orientH), PAR_QA(qa));
CLogD(TAG, "Rot QR: " FMT_Q(4) " / " FMT_QA(1), PAR_Q(orientHI), PAR_QA(qai));
CLogD(TAG, "Rot LR -> " FMT_V4(1), PAR_V4(rotV));
// Transform the point using the incorrect q * v rotation and multiply from Left only
orientF = qEulerF * orientF;
qa = ToAngularForm(orientF);
rotV = orientF * v;
CLogD(TAG, "Rot QR: " FMT_Q(4) " / " FMT_QA(1), PAR_Q(orientF), PAR_QA(qa));
CLogD(TAG, "Rot L -> " FMT_V4(1), PAR_V4(rotV));
}
// Rotate for 90 degrees around the Z axis
// Full Euler steps for q * v rotation
euler = vec3(RAD(0.0f), RAD(0.0f), RAD(90.0f));
eulerStep = euler / (float)rotSteps;
qEulerF = quat(eulerStep); // GetRotQuat(eulerStep);
qa = ToAngularForm(qEulerF);
orientEuler = eulerAngles(qEulerF);
CLogD(TAG, "Rot Full Step Q [W, X, Y, Z]: " FMT_Q(4) " / " FMT_V3(2) "deg / " FMT_QA(2), PAR_Q(qEulerF), PAR_V3(degrees(orientEuler)), PAR_QA(qa));
// Half Euler steps for q * v * q^-1 rotation
eulerStepH = eulerStep / 2.0f;
qEulerH = quat(eulerStepH); // GetRotQuat(eulerStepH);
qa = ToAngularForm(qEulerH);
orientEuler = eulerAngles(qEulerH);
CLogD(TAG, "Rot Half Step Q [W, X, Y, Z]: " FMT_Q(4) " / " FMT_V3(2) "deg / " FMT_QA(2), PAR_Q(qEulerH), PAR_V3(degrees(orientEuler)), PAR_QA(qa));
qEulerHI = inverse(qEulerH);
qai = ToAngularForm(qEulerHI);
orientEuler = eulerAngles(qEulerHI);
CLogD(TAG, "Rot Half Step Q^-1 [W, X, Y, Z]: " FMT_Q(4) " / " FMT_V3(2) "deg / " FMT_QA(2), PAR_Q(qEulerHI), PAR_V3(degrees(orientEuler)), PAR_QA(qai));
for (int rotStep = 1; rotStep <= rotSteps; ++rotStep)
{
// Track the absolute Euler rotation
eulerState += eulerStep;
// Rotate by incremental rotation as defined by Euler angles
orientH = qEulerH * orientH;
orientEuler = eulerAngles(orientH);
CLogI(TAG, "Rot Step %d. Curr Abs Q: " FMT_Q(4) "/" FMT_V3(2) "deg, Abs Euler: " FMT_V3(2) "deg",
rotStep, PAR_Q(orientH), PAR_V3(degrees(orientEuler)), PAR_V3(degrees(eulerState)));
// Transform the point using the correct q * v * q^-1 rotation and multiply from Left and Right
quat orientHI = inverse(orientH);
qa = ToAngularForm(orientH);
qai = ToAngularForm(orientHI);
vec4 rotV = orientH * v * orientHI;
CLogD(TAG, "Rot QL: " FMT_Q(4) " / " FMT_QA(1), PAR_Q(orientH), PAR_QA(qa));
CLogD(TAG, "Rot QR: " FMT_Q(4) " / " FMT_QA(1), PAR_Q(orientHI), PAR_QA(qai));
CLogD(TAG, "Rot LR -> " FMT_V4(1), PAR_V4(rotV));
// Transform the point using the incorrect q * v rotation and multiply from Left only
orientF = qEulerF * orientF;
qa = ToAngularForm(orientF);
rotV = orientF * v;
CLogD(TAG, "Rot QR: " FMT_Q(4) " / " FMT_QA(1), PAR_Q(orientF), PAR_QA(qa));
CLogD(TAG, "Rot L -> " FMT_V4(1), PAR_V4(rotV));
}
输出:
Rot Full Step Q [W, X, Y, Z]: [ 0.9808, [ 0.1951, 0.0000, 0.0000]] / [ 22.50, -0.00, 0.00]deg / cos( 11.25) + sin( 11.25)( 1.00i + 0.00j + 0.00k)
Rot Half Step Q [W, X, Y, Z]: [ 0.9952, [ 0.0980, 0.0000, 0.0000]] / [ 11.25, -0.00, 0.00]deg / cos( 5.63) + sin( 5.63)( 1.00i + 0.00j + 0.00k)
Rot Half Step Q^-1 [W, X, Y, Z]: [ 0.9952, [-0.0980, -0.0000, -0.0000]] / [-11.25, -0.00, 0.00]deg / cos( 5.63) + sin( 5.63)(-1.00i + -0.00j + -0.00k)
Rot Step 1. Curr Abs Q: [ 0.9952, [ 0.0980, 0.0000, 0.0000]]/[ 11.25, -0.00, 0.00]deg, Abs Euler: [ 22.50, 0.00, 0.00]deg
Rot QL: [ 0.9952, [ 0.0980, 0.0000, 0.0000]] / cos( 5.6) + sin( 5.6)( 1.0i + 0.0j + 0.0k)
Rot QR: [ 0.9952, [-0.0980, -0.0000, -0.0000]] / cos( 5.6) + sin( 5.6)(-1.0i + -0.0j + -0.0k)
Rot LR -> [ 0.0, -1.1, 2.8, 0.0]
Rot QR: [ 0.9808, [ 0.1951, 0.0000, 0.0000]] / cos( 11.3) + sin( 11.3)( 1.0i + 0.0j + 0.0k)
Rot L -> [ 0.0, -1.1, 2.8, 0.0]
Rot Step 2. Curr Abs Q: [ 0.9808, [ 0.1951, 0.0000, 0.0000]]/[ 22.50, -0.00, 0.00]deg, Abs Euler: [ 45.00, 0.00, 0.00]deg
Rot QL: [ 0.9808, [ 0.1951, 0.0000, 0.0000]] / cos( 11.3) + sin( 11.3)( 1.0i + 0.0j + 0.0k)
Rot QR: [ 0.9808, [-0.1951, -0.0000, -0.0000]] / cos( 11.2) + sin( 11.2)(-1.0i + -0.0j + -0.0k)
Rot LR -> [ 0.0, -2.1, 2.1, 0.0]
Rot QR: [ 0.9239, [ 0.3827, 0.0000, 0.0000]] / cos( 22.5) + sin( 22.5)( 1.0i + 0.0j + 0.0k)
Rot L -> [ 0.0, -2.1, 2.1, 0.0]
Rot Step 3. Curr Abs Q: [ 0.9569, [ 0.2903, 0.0000, 0.0000]]/[ 33.75, -0.00, 0.00]deg, Abs Euler: [ 67.50, 0.00, 0.00]deg
Rot QL: [ 0.9569, [ 0.2903, 0.0000, 0.0000]] / cos( 16.9) + sin( 16.9)( 1.0i + 0.0j + 0.0k)
Rot QR: [ 0.9569, [-0.2903, -0.0000, -0.0000]] / cos( 16.9) + sin( 16.9)(-1.0i + -0.0j + -0.0k)
Rot LR -> [ 0.0, -2.8, 1.1, 0.0]
Rot QR: [ 0.8315, [ 0.5556, 0.0000, 0.0000]] / cos( 33.8) + sin( 33.8)( 1.0i + 0.0j + 0.0k)
Rot L -> [ 0.0, -2.8, 1.1, 0.0]
Rot Step 4. Curr Abs Q: [ 0.9239, [ 0.3827, 0.0000, 0.0000]]/[ 45.00, -0.00, 0.00]deg, Abs Euler: [ 90.00, 0.00, 0.00]deg
Rot QL: [ 0.9239, [ 0.3827, 0.0000, 0.0000]] / cos( 22.5) + sin( 22.5)( 1.0i + 0.0j + 0.0k)
Rot QR: [ 0.9239, [-0.3827, -0.0000, -0.0000]] / cos( 22.5) + sin( 22.5)(-1.0i + -0.0j + -0.0k)
Rot LR -> [ 0.0, -3.0, 0.0, 0.0]
Rot QR: [ 0.7071, [ 0.7071, 0.0000, 0.0000]] / cos( 45.0) + sin( 45.0)( 1.0i + 0.0j + 0.0k)
Rot L -> [ 0.0, -3.0, 0.0, 0.0]
Rot Full Step Q [W, X, Y, Z]: [ 0.9808, [ 0.0000, 0.0000, 0.1951]] / [ 0.00, -0.00, 22.50]deg / cos( 11.25) + sin( 11.25)( 0.00i + 0.00j + 1.00k)
Rot Half Step Q [W, X, Y, Z]: [ 0.9952, [ 0.0000, 0.0000, 0.0980]] / [ 0.00, -0.00, 11.25]deg / cos( 5.63) + sin( 5.63)( 0.00i + 0.00j + 1.00k)
Rot Half Step Q^-1 [W, X, Y, Z]: [ 0.9952, [-0.0000, -0.0000, -0.0980]] / [ 0.00, -0.00, -11.25]deg / cos( 5.63) + sin( 5.63)(-0.00i + -0.00j + -1.00k)
Rot Step 1. Curr Abs Q: [ 0.9194, [ 0.3808, 0.0375, 0.0906]]/[ 45.00, 0.00, 11.25]deg, Abs Euler: [ 90.00, 0.00, 22.50]deg
Rot QL: [ 0.9194, [ 0.3808, 0.0375, 0.0906]] / cos( 23.2) + sin( 23.2)( 1.0i + 0.1j + 0.2k)
Rot QR: [ 0.9194, [-0.3808, -0.0375, -0.0906]] / cos( 23.2) + sin( 23.2)(-1.0i + -0.1j + -0.2k)
Rot LR -> [ 1.0, -2.8, 0.0, 0.0]
Rot QR: [ 0.6935, [ 0.6935, 0.1379, 0.1379]] / cos( 46.1) + sin( 46.1)( 1.0i + 0.2j + 0.2k)
Rot L -> [ 1.1, -2.8, 0.0, 0.0]
Rot Step 2. Curr Abs Q: [ 0.9061, [ 0.3753, 0.0747, 0.1802]]/[ 45.00, -0.00, 22.50]deg, Abs Euler: [ 90.00, 0.00, 45.00]deg
Rot QL: [ 0.9061, [ 0.3753, 0.0747, 0.1802]] / cos( 25.0) + sin( 25.0)( 0.9i + 0.2j + 0.4k)
Rot QR: [ 0.9061, [-0.3753, -0.0747, -0.1802]] / cos( 25.0) + sin( 25.0)(-0.9i + -0.2j + -0.4k)
Rot LR -> [ 1.9, -2.4, 0.1, 0.0]
Rot QR: [ 0.6533, [ 0.6533, 0.2706, 0.2706]] / cos( 49.2) + sin( 49.2)( 0.9i + 0.4j + 0.4k)
Rot L -> [ 2.1, -2.1, 0.0, 0.0]
Rot Step 3. Curr Abs Q: [ 0.8841, [ 0.3662, 0.1111, 0.2682]]/[ 45.00, 0.00, 33.75]deg, Abs Euler: [ 90.00, 0.00, 67.50]deg
Rot QL: [ 0.8841, [ 0.3662, 0.1111, 0.2682]] / cos( 27.9) + sin( 27.9)( 0.8i + 0.2j + 0.6k)
Rot QR: [ 0.8841, [-0.3662, -0.1111, -0.2682]] / cos( 27.9) + sin( 27.9)(-0.8i + -0.2j + -0.6k)
Rot LR -> [ 2.5, -1.6, 0.3, 0.0]
Rot QR: [ 0.5879, [ 0.5879, 0.3928, 0.3928]] / cos( 54.0) + sin( 54.0)( 0.7i + 0.5j + 0.5k)
Rot L -> [ 2.8, -1.1, 0.0, 0.0]
Rot Step 4. Curr Abs Q: [ 0.8536, [ 0.3536, 0.1464, 0.3536]]/[ 45.00, 0.00, 45.00]deg, Abs Euler: [ 90.00, 0.00, 90.00]deg
Rot QL: [ 0.8536, [ 0.3536, 0.1464, 0.3536]] / cos( 31.4) + sin( 31.4)( 0.7i + 0.3j + 0.7k)
Rot QR: [ 0.8536, [-0.3536, -0.1464, -0.3536]] / cos( 31.4) + sin( 31.4)(-0.7i + -0.3j + -0.7k)
Rot LR -> [ 2.9, -0.7, 0.4, 0.0]
Rot QR: [ 0.5000, [ 0.5000, 0.5000, 0.5000]] / cos( 60.0) + sin( 60.0)( 0.6i + 0.6j + 0.6k)
Rot L -> [ 3.0, 0.0, 0.0, 0.0]