我想在控制点上绘制曲线,以便我可以移动曲线来改变颜色。下面是代码,从一个非常好的解释答案中得到帮助。
const int N=5; // number of control points (must be >= 4)
float ctrl[N]= // control points y values initiated with linear function y=x
{ // x value is index*1.0/(N-1)
0.00,
0.25,
0.50,
0.75,
1.00,
};
float correction(float col,float *ctrl,int n)
{
float di=1.0/float(n-1);
int i0,i1,i2,i3;
float t,tt,ttt;
float a0,a1,a2,a3,d1,d2;
// find start control point
col*=float(n-1);
i1=col; col-=i1;
i0=i1-1;
i2=i1+1; if (i2>=n) i2=n-1;
i3=i1+2;
// compute interpolation coefficients
if (i0>=0) d1=0.5*(ctrl[i2]-ctrl[i0]); else d1=ctrl[i2]-ctrl[i1];
if (i3< n) d2=0.5*(ctrl[i3]-ctrl[i1]); else d2=ctrl[i2]-ctrl[i1];
a0=ctrl[i1];
a1=d1;
a2=(3.0*(ctrl[i2]-ctrl[i1]))-(2.0*d1)-d2;
a3=d1+d2+(2.0*(-ctrl[i2]+ctrl[i1]));
// now interpolate new colro intensity
t=col; tt=t*t; ttt=tt*t;
t=a0+(a1*t)+(a2*tt)+(a3*ttt);
return t;
}
int main (int argc, const char** argv)
{
Mat input = imread ("E:\\img2.jpg");
Mat input1 = input;
for(int i=0 ; i<input1.rows ; i++)
{
for (int p=0;p<input1.cols;p++)
{
input1.at<cv::Vec3b>(i,p)[0] = 255*correction(input1.at<cv::Vec3b>(i,p)[0]/255.0,ctrl,N); //B
input1.at<cv::Vec3b>(i,p)[1] = 255*correction(input1.at<cv::Vec3b>(i,p)[1]/255.0,ctrl,N); //G
input1.at<cv::Vec3b>(i,p)[2] = 255*correction(input1.at<cv::Vec3b>(i,p)[2]/255.0,ctrl,N); //R
}
}
imshow("image" , input);
waitKey();
}
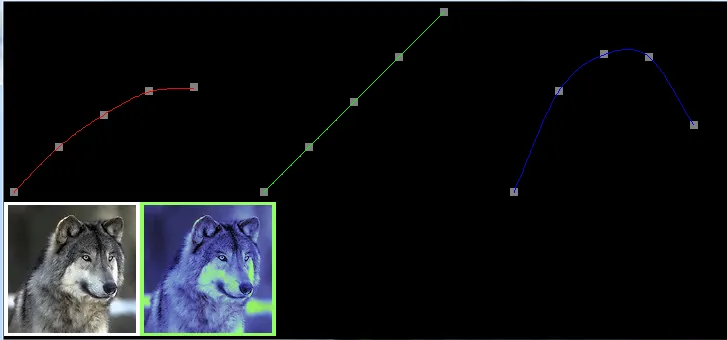
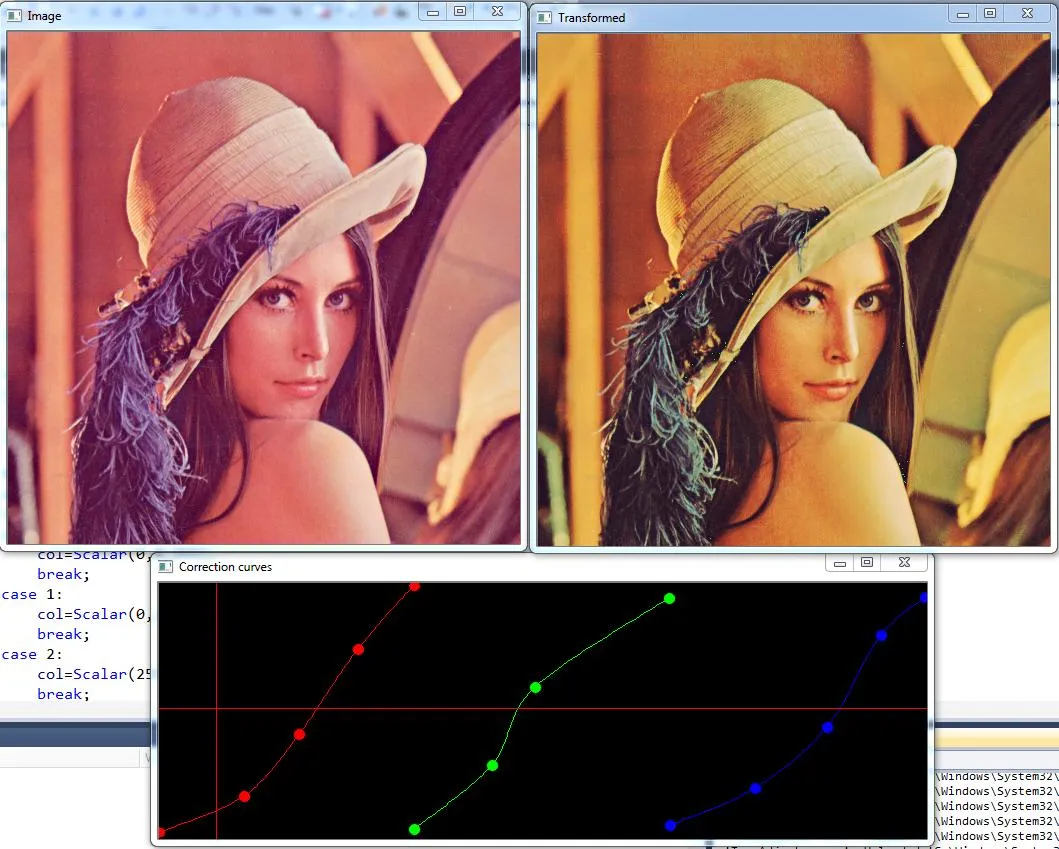
但是需要的输出结果就像下图所示的曲线一样:程序正在运行,但是曲线没有在我的屏幕上绘制出来,如何使用opencv或其他方法画出它们,这样这些线条就可以扮演图像中特定颜色的角色,并带有它们的值,如下图所示右侧的图像是原始图像,左侧的图像是通过曲线更改值的结果,下面的曲线是每个B,G,R控制点