我从来没有找到加速计算的方法,但只要体素数量较低,模拟就可以很好地工作。
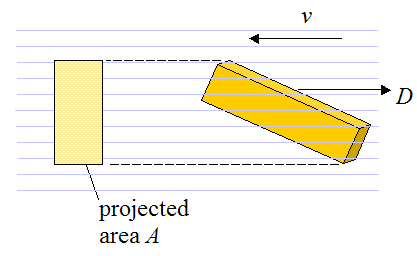
该模拟根据每个体素的速度计算阻力。它检查它是否在物体的前沿,并且如果是,则施加其阻力。
代码可能有点难以理解,但至少可以让您开始尝试。如果您有任何问题或需要澄清,请告诉我。
此代码是我上面更新#3的稍微整理过的版本。
在操作中:
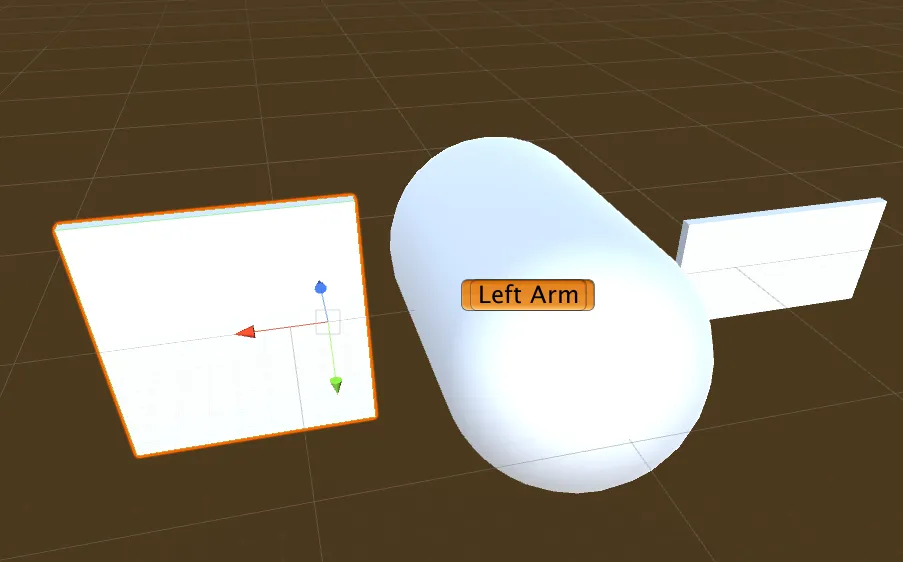
在模拟开始时(物体向屏幕右下方直线移动)
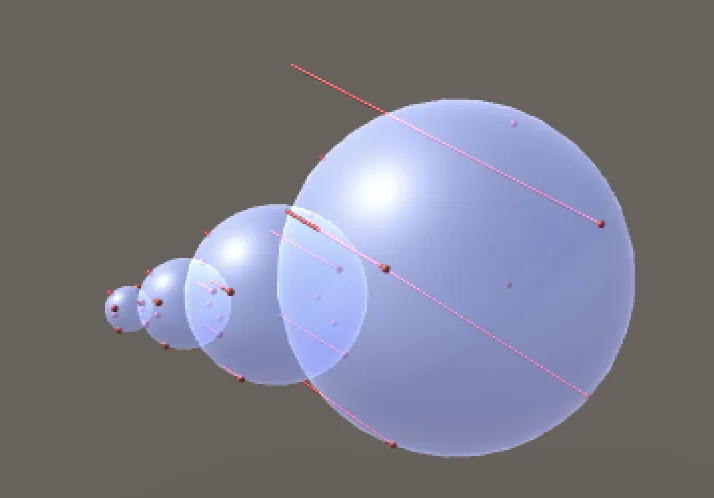
您可以看到添加的力箭头用于可视化以及表示体素的圆圈。力与体素大致代表的表面积成比例,并且仅形状的前沿有助于减拖。
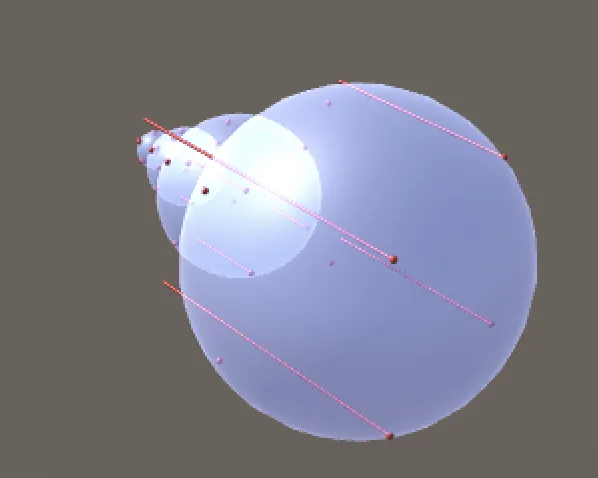
随着模拟的继续,由于阻力,形状会正确地旋转到最具空气动力学性能的位置,并且后部区域停止贡献阻力。
可拖动的形状类
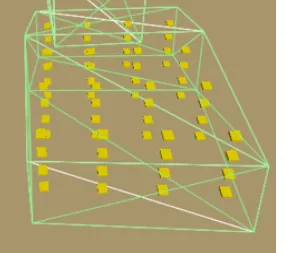
将此类拖到主对象(刚体)上以启用拖动。您可以选择在球形周围创建体素的扩散,或加载自己定制的带有 Voxel 脚本附加的游戏对象作为体素,并将其设置为此对象的子级。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System.Linq;
[RequireComponent (typeof(Rigidbody))]
public class DragEnabledShape : MonoBehaviour {
const float EPSILON = 0.0001f;
public Voxel voxelPrefab;
public float C = 1f;
public float d = 0.5f;
public int resolutionFactor = 2;
public float maxDistanceFromCenter = 10f;
public bool displayDragVisualization = false;
public float forceVisualizationMultiplier = 1f;
public bool displayVoxels = false;
public bool loadCustomVoxels = false;
List<Voxel> voxels;
Rigidbody rb;
void Awake () {
voxels = new List<Voxel> ();
rb = GetComponent<Rigidbody> ();
}
void OnEnable () {
if (loadCustomVoxels) {
var customVoxels = GetComponentsInChildren<Voxel> ();
voxels.AddRange (customVoxels);
if (displayDragVisualization) {
foreach (Voxel voxel in customVoxels) {
voxel.DisplayDrag (forceVisualizationMultiplier);
}
}
if (displayVoxels) {
foreach (Voxel voxel in customVoxels) {
voxel.Display ();
}
}
}
else {
foreach (Transform child in GetComponentsInChildren<Transform> ()) {
if (child.GetComponent<Collider> ()) {
CreateSurfaceVoxels (child);
}
}
}
}
void CreateSurfaceVoxels (Transform body) {
List<Vector3> directionList = new List<Vector3> ();
for (float i = -1; i <= 1 + EPSILON; i += 2f / resolutionFactor) {
for (float j = -1; j <= 1 + EPSILON; j += 2f / resolutionFactor) {
for (float k = -1; k <= 1 + EPSILON; k += 2f / resolutionFactor) {
Vector3 v = new Vector3 (i, j, k);
directionList.Add (v);
}
}
}
foreach (Vector3 direction in directionList) {
Ray upRay = new Ray (body.position, direction).Reverse (maxDistanceFromCenter);
RaycastHit[] hits = Physics.RaycastAll (upRay, maxDistanceFromCenter);
if (hits.Length > 0) {
foreach (RaycastHit hit in hits) {
if (hit.collider == body.GetComponent<Collider> ()) {
GameObject empty = new GameObject ();
empty.name = "Voxels";
empty.transform.parent = body;
empty.transform.localPosition = Vector3.zero;
GameObject newVoxelObject = Instantiate (voxelPrefab.gameObject, empty.transform);
Voxel newVoxel = newVoxelObject.GetComponent<Voxel> ();
voxels.Add (newVoxel);
newVoxel.transform.position = hit.point;
newVoxel.transform.rotation = Quaternion.LookRotation (hit.normal);
newVoxel.DetermineTotalSurfaceArea (hit.distance - maxDistanceFromCenter, resolutionFactor);
newVoxel.attachedToCollider = body.GetComponent<Collider> ();
if (displayDragVisualization) {
newVoxel.DisplayDrag (forceVisualizationMultiplier);
}
if (displayVoxels) {
newVoxel.Display ();
}
}
else {
}
}
}
}
}
void FixedUpdate () {
foreach (Voxel voxel in voxels) {
rb.AddForceAtPosition (voxel.GetDrag (), voxel.transform.position);
}
}
}
体素类
此脚本附加在放置在形状周围的小游戏对象上。它们代表计算拖动的位置。因此,对于复杂的形状,这些位置应该位于任何极端位置,并且应该相对分散地分布在物体上。体素对象的刚体质量应该近似于此体素所代表的物体部分。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class Voxel : MonoBehaviour {
Vector3 velocity;
public Collider attachedToCollider;
Vector3 drag;
public Vector3 Drag {
get {
return drag;
}
}
float dragMagnitude;
public float DragMagnitude {
get {
return dragMagnitude;
}
}
bool leadingEdge;
public bool LeadingEdge {
get {
return leadingEdge;
}
}
bool firstUpdate = true;
public float localSurfaceArea;
Vector3 prevPos;
public VoxelForceVisualizer forceVisualizer;
public VoxelVisualizer voxelVisualizer;
const float AREA_COEFFICIENT = 1.1f;
const float EPSILON = 0.001f;
const float FAR_DISTANCE = 5f;
const float MAX_FORCE = 100f;
public void DetermineTotalSurfaceArea (float distanceFromCenter, float resolution) {
float theta = (Mathf.PI / 4) / resolution;
float localR = distanceFromCenter * Mathf.Tan (theta) * AREA_COEFFICIENT;
localSurfaceArea = Mathf.PI * localR * localR;
}
bool IsVisibleFromPlane () {
if (attachedToCollider == null) {
throw new MissingReferenceException ("attached to collider not set");
}
bool visibleFromPlane = false;
Ray justOutsideSurface = new Ray (this.transform.position, velocity).Reverse (EPSILON);
RaycastHit hit;
if (Physics.Raycast (justOutsideSurface, out hit, EPSILON * 2f)) {
if (hit.collider == attachedToCollider) {
visibleFromPlane = true;
}
}
leadingEdge = visibleFromPlane;
return visibleFromPlane;
}
void FixedUpdate () {
if (firstUpdate) {
prevPos = transform.position;
firstUpdate = false;
}
velocity = (transform.position - prevPos) / Time.deltaTime;
prevPos = transform.position;
}
public Vector3 GetDrag () {
if (IsVisibleFromPlane ()) {
float alignment = Vector3.Dot (velocity, this.transform.forward);
float A = alignment * localSurfaceArea;
dragMagnitude = DragForce.Calculate (velocity.sqrMagnitude, A);
drag = -velocity * dragMagnitude;
}
return drag;
}
public void Display () {
voxelVisualizer.gameObject.SetActive (true);
}
public void TurnOffDisplay () {
voxelVisualizer.gameObject.SetActive (false);
}
public void DisplayDrag (float forceMultiplier) {
forceVisualizer.gameObject.SetActive (true);
forceVisualizer.multiplier = forceMultiplier;
}
public void TurnOffDragDisplay () {
forceVisualizer.gameObject.SetActive (false);
}
}
VoxelForceVisualizer
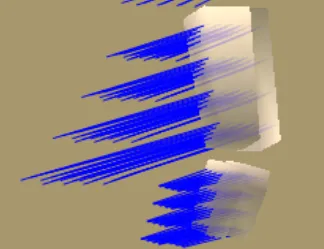
这是一个附加到预制体的细箭头,我将其作为像素的子对象,以便在调试拖动力时绘制力箭头。
using UnityEngine;
public class VoxelForceVisualizer : MonoBehaviour {
const float TINY_NUMBER = 0.00000001f;
public Voxel voxel;
public float drag;
public float multiplier;
void Start () {
voxel = this.GetComponentInParent<Voxel> ();
}
void Update () {
Vector3 rescale;
if (voxel.LeadingEdge && voxel.Drag != Vector3.zero) {
this.transform.rotation = Quaternion.LookRotation (voxel.Drag);
rescale = new Vector3 (1f, 1f, voxel.DragMagnitude * multiplier);
}
else {
rescale = Vector3.zero;
}
this.transform.localScale = rescale;
drag = voxel.DragMagnitude;
}
}
VoxelVisualizer
这个脚本被附加到一个小球体对象上,作为体素空物体的子级。它只是用来查看体素的位置,并让上面的脚本在不禁用拖动力计算的情况下显示/隐藏体素。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class VoxelVisualizer : MonoBehaviour {
}
DragForce
这个函数用于计算阻力力量。
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public static class DragForce {
const float EPSILON = 0.000001f;
public static float Calculate (float coefficient, float density, float vsq, float A) {
float f = coefficient * density * vsq * A;
return f;
}
public static float Calculate (float vsq, float A) {
return Calculate (1f, 1f, vsq, A);
}
}
{kind=link}