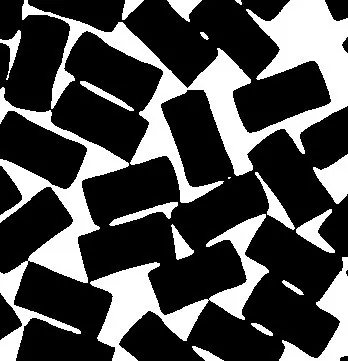
如果图像中的正方形有连通区域,我应该如何检测它们?
我已经尝试了在OpenCV C++/Obj-C: Advanced square detection中提到的方法,但效果不佳。
有什么好的想法吗?
import cv2
import numpy as np
def angle_cos(p0, p1, p2):
d1, d2 = (p0-p1).astype('float'), (p2-p1).astype('float')
return abs( np.dot(d1, d2) / np.sqrt( np.dot(d1, d1)*np.dot(d2, d2) ) )
def find_squares(img):
squares = []
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# cv2.imshow("gray", gray)
gaussian = cv2.GaussianBlur(gray, (5, 5), 0)
temp,bin = cv2.threshold(gaussian, 80, 255, cv2.THRESH_BINARY)
# cv2.imshow("bin", bin)
contours, hierarchy = cv2.findContours(bin, cv2.RETR_CCOMP, cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours( gray, contours, -1, (0, 255, 0), 3 )
#cv2.imshow('contours', gray)
for cnt in contours:
cnt_len = cv2.arcLength(cnt, True)
cnt = cv2.approxPolyDP(cnt, 0.02*cnt_len, True)
if len(cnt) == 4 and cv2.contourArea(cnt) > 1000 and cv2.isContourConvex(cnt):
cnt = cnt.reshape(-1, 2)
max_cos = np.max([angle_cos( cnt[i], cnt[(i+1) % 4], cnt[(i+2) % 4] ) for i in xrange(4)])
if max_cos < 0.1:
squares.append(cnt)
return squares
if __name__ == '__main__':
img = cv2.imread('123.bmp')
#cv2.imshow("origin", img)
squares = find_squares(img)
print "Find %d squres" % len(squares)
cv2.drawContours( img, squares, -1, (0, 255, 0), 3 )
cv2.imshow('squares', img)
cv2.waitKey()
我在OpenCV的示例中使用了一些方法,但结果不太好。



(y, x)坐标,而OpenCV则期望(x, y)。@fraxel我没有测量性能,但更新后的代码在这一特定点上可能更好。 - mmgpn次以断开组件,这只是在等待失败。我不知道对你来说什么速度太慢,从未提到过,但对我来说运行得足够快。 - mmgp