动机
看看以下图片。
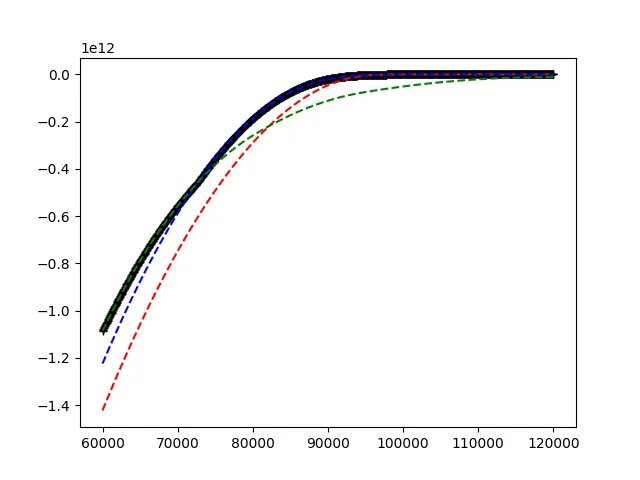
给出了红、蓝和绿曲线。我想在每个 x 轴上找到占优势的曲线。如图所示,这是作为黑色图表显示的。由于红、绿和蓝曲线的属性(在一段时间后增加和恒定),这归结于在最右边找到占优势的曲线,然后向左移动,找到所有交点并更新占优曲线。
需要解决此问题T次。问题的最后一个变化是:下一次迭代的蓝、绿和红曲线是通过前一次迭代的占优解加上某些可变参数进行构造的。例如,在上面的图中:解决方案是黑色函数。使用此函数生成新的蓝、绿和红曲线。然后问题开始寻找这些新曲线的占优解。
问题简述
在每个迭代中,我从固定的最右侧开始,并评估所有三个函数,以查看哪个是占优解。这些评估随着迭代的进行而变得越来越慢。 我的感觉是我没有最优地传递旧的占优函数来构造新的蓝、绿和红曲线。原因:在早期版本中,我遇到了最大递归深度错误。代码的其他部分需要当前占优函数的值 (它可能是绿色、红色或蓝色曲线),这也要随着迭代而变得越来越慢。
对于5次迭代,仅在最右侧的一个点上评估函数将会增长:
结果是通过以下方式产生的:
test = A(5, 120000, 100000)
然后运行
test.find_all_intersections()
>>> test.find_all_intersections()
iteration 4
to compute function values it took
0.0102479457855
iteration 3
to compute function values it took
0.0134601593018
iteration 2
to compute function values it took
0.0294270515442
iteration 1
to compute function values it took
0.109843969345
iteration 0
to compute function values it took
0.823768854141
我想知道为什么这是这样的,以及是否能更有效地编程。
详细的代码解释:
1. 方法:为了生成上述绿色、红色和蓝色曲线的新批次,我们需要旧的主导曲线。u 是在第一次迭代中使用的初始化。 2. 方法_function_template:该函数使用不同的参数生成绿色、蓝色和红色曲线的版本。它返回一个单输入函数。 3. 方法eval:这是每次生成蓝色、绿色和红色版本的核心函数。每次迭代都会有三个可变参数:vfunction 是上一步的主导函数,m 和 s 是影响结果曲线形状的两个参数(flaots)。其他参数在每次迭代中都是相同的。在代码中,对于每次迭代,都有 m 和 s 的示例值。对于更极客的人来说,这是为了近似求解积分,其中 m 和 s 是基础正态分布的期望均值和标准差。通过 Gauss-Hermite 节点/权重来进行近似计算。 4. 方法find_all_intersections:这是找到每次迭代中主导函数的核心方法。它通过将蓝色、绿色和红色曲线拼接成段来构建一个主导函数。这是通过函数 piecewise 实现的。 以下是完整的代码。
import numpy as np
import pandas as pd
from scipy.optimize import brentq
import multiprocessing as mp
import pathos as pt
import timeit
import math
class A(object):
def u(self, w):
_w = np.asarray(w).copy()
_w[_w >= 120000] = 120000
_p = np.maximum(0, 100000 - _w)
return _w - 1000*_p**2
def __init__(self, T, upper_bound, lower_bound):
self.T = T
self.upper_bound = upper_bound
self.lower_bound = lower_bound
def _function_template(self, *args):
def _f(x):
return self.evalv(x, *args)
return _f
def evalv(self, w, c, vfunction, g, m, s, gauss_weights, gauss_nodes):
_A = np.tile(1 + m + math.sqrt(2) * s * gauss_nodes, (np.size(w), 1))
_W = (_A.T * w).T
_W = gauss_weights * vfunction(np.ravel(_W)).reshape(np.size(w),
len(gauss_nodes))
evalue = g*1/math.sqrt(math.pi)*np.sum(_W, axis=1)
return c + evalue
def find_all_intersections(self):
# the hermite gauss weights and nodes for integration
# and additional paramters used for function generation
gauss = np.polynomial.hermite.hermgauss(10)
gauss_nodes = gauss[0]
gauss_weights = gauss[1]
r = np.asarray([1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1., 1.,
1., 1., 1., 1., 1., 1., 1., 1., 1.])
m = [[0.038063407778193614, 0.08475713587463352, 0.15420895520972322],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.03836174909668277, 0.08543620707856969, 0.15548297423808233],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.038063407778193614, 0.08475713587463352, 0.15420895520972322],
[0.038063407778193614, 0.08475713587463352, 0.15420895520972322],
[0.03836174909668277, 0.08543620707856969, 0.15548297423808233],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.038063407778193614, 0.08475713587463352, 0.15420895520972322],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.03836174909668277, 0.08543620707856969, 0.15548297423808233],
[0.038063407778193614, 0.08475713587463352, 0.15420895520972322],
[0.038063407778193614, 0.08475713587463352, 0.15420895520972322],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.03836174909668277, 0.08543620707856969, 0.15548297423808233],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624],
[0.038212567720998125, 0.08509661835487026, 0.15484578903763624]]
s = [[0.01945441966324046, 0.04690600929081242, 0.200125178687699],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.019529101011406914, 0.04708607140891122, 0.20089341636351565],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.01945441966324046, 0.04690600929081242, 0.200125178687699],
[0.01945441966324046, 0.04690600929081242, 0.200125178687699],
[0.019529101011406914, 0.04708607140891122, 0.20089341636351565],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.01945441966324046, 0.04690600929081242, 0.200125178687699],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.019529101011406914, 0.04708607140891122, 0.20089341636351565],
[0.01945441966324046, 0.04690600929081242, 0.200125178687699],
[0.01945441966324046, 0.04690600929081242, 0.200125178687699],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.019529101011406914, 0.04708607140891122, 0.20089341636351565],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142],
[0.019491796104351332, 0.04699612658674578, 0.20050966545654142]]
self.solution = []
n_cpu = mp.cpu_count()
pool = pt.multiprocessing.ProcessPool(n_cpu)
# this function is used for multiprocessing
def call_f(f, x):
return f(x)
# this function takes differences for getting cross points
def _diff(f_dom, f_other):
def h(x):
return f_dom(x) - f_other(x)
return h
# finds the root of two function
def find_roots(F, u_bound, l_bound):
try:
sol = brentq(F, a=l_bound,
b=u_bound)
if np.absolute(sol - u_bound) > 1:
return sol
else:
return l_bound
except ValueError:
return l_bound
# piecewise function
def piecewise(l_comp, l_f):
def f(x):
_ind_f = np.digitize(x, l_comp) - 1
if np.isscalar(x):
return l_f[_ind_f](x)
else:
return np.asarray([l_f[_ind_f[i]](x[i])
for i in range(0, len(x))]).ravel()
return f
_u = self.u
for t in range(self.T-1, -1, -1):
print('iteration' + ' ' + str(t))
l_bound, u_bound = 0.5*self.lower_bound, self.upper_bound
l_ordered_functions = []
l_roots = []
l_solution = []
# build all function variations
l_functions = [self._function_template(0, _u, r[t], m[t][i], s[t][i],
gauss_weights, gauss_nodes)
for i in range(0, len(m[t]))]
# get the best solution for the upper bound on the very
# right hand side of wealth interval
array_functions = np.asarray(l_functions)
start_time = timeit.default_timer()
functions_values = pool.map(call_f, array_functions.tolist(),
len(m[t]) * [u_bound])
elapsed = timeit.default_timer() - start_time
print('to compute function values it took')
print(elapsed)
ind = np.argmax(functions_values)
cross_points = len(m[t]) * [u_bound]
l_roots.insert(0, u_bound)
max_m = m[t][ind]
l_solution.insert(0, max_m)
# move from the upper bound twoards the lower bound
# and find the dominating solution by exploring all cross
# points.
test = True
while test:
l_ordered_functions.insert(0, array_functions[ind])
current_max = l_ordered_functions[0]
l_c_max = len(m[t]) * [current_max]
l_u_cross = len(m[t]) * [cross_points[ind]]
# Find new cross points on the smaller interval
diff = pool.map(_diff, l_c_max, array_functions.tolist())
cross_points = pool.map(find_roots, diff,
l_u_cross, len(m[t]) * [l_bound])
# update the solution, cross points and current
# dominating function.
ind = np.argmax(cross_points)
l_roots.insert(0, cross_points[ind])
max_m = m[t][ind]
l_solution.insert(0, max_m)
if cross_points[ind] <= l_bound:
test = False
l_ordered_functions.insert(0, l_functions[0])
l_roots.insert(0, 0)
l_roots[-1] = np.inf
l_comp = l_roots[:]
l_f = l_ordered_functions[:]
# build piecewise function which is used for next
# iteration.
_u = piecewise(l_comp, l_f)
_sol = pd.DataFrame(data=l_solution,
index=np.asarray(l_roots)[0:-1])
self.solution.insert(0, _sol)
return self.solution
eval/vfunction在每次迭代中都会增加复杂度,因为它需要重新评估所有基础和前置函数。 - Kirk Broadhurst