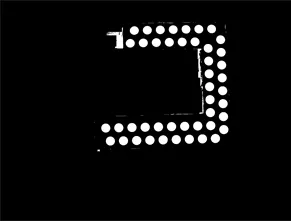
我需要一个非常精确的算法来适应数据点集的圆(实际上我需要确定中心)。数据在图像二值化和分割之后得到。我尝试了简单的质心和加权质心算法,还尝试了预制的OpenCV :: fitEllipse函数。虽然我从OpenCV函数中获得了最佳结果,但仍然不够准确。当中心固定在亚像素区域时,结果会受到显著影响。即使处理模拟数据时获得的精度也不足够,这很糟糕,因为最终该过程将不得不处理由相机捕获的数据。您有什么建议,应该寻找什么样的算法,或者是否有任何已准备好的解决方案?我宁愿不链接任何外部库。感谢您的帮助。
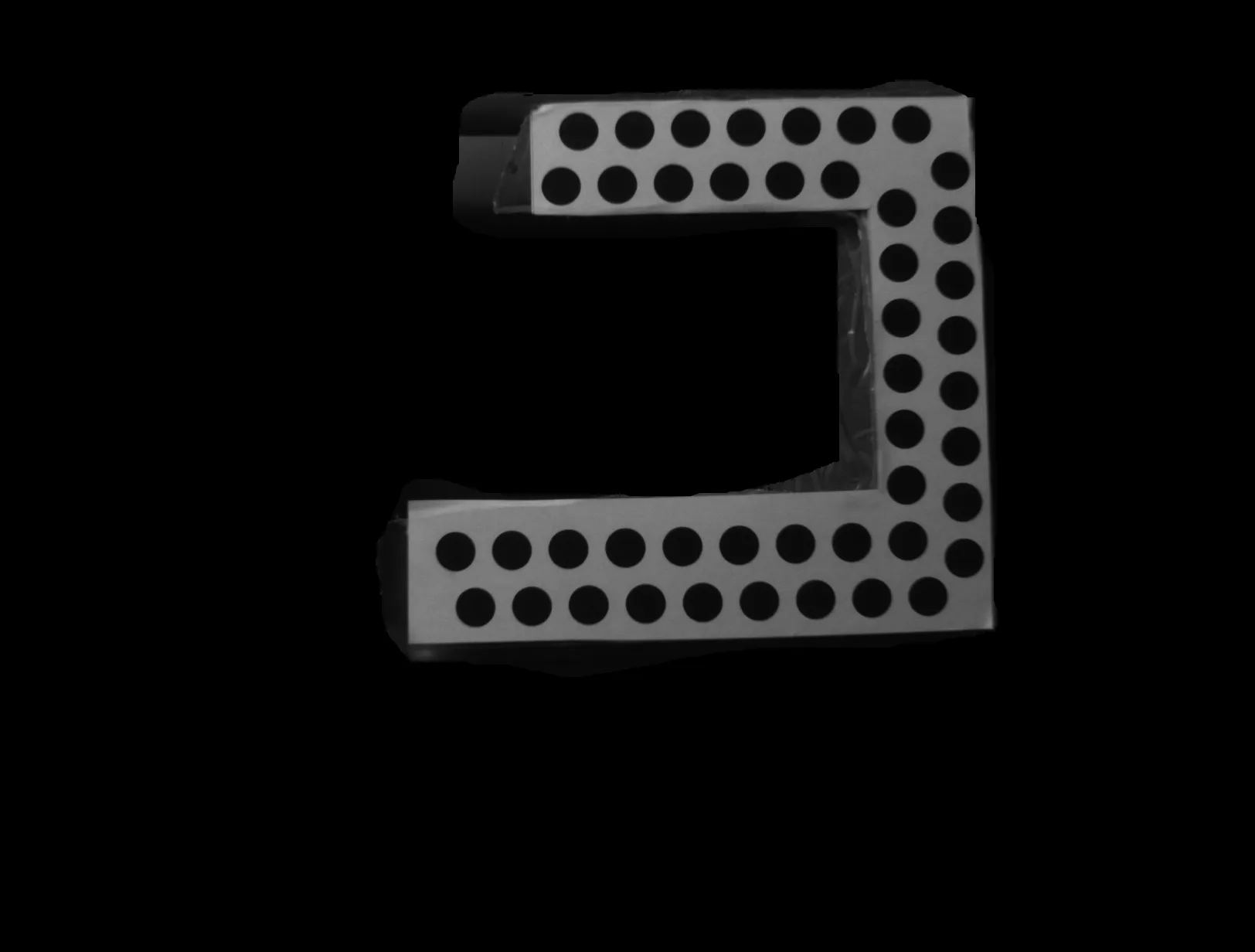
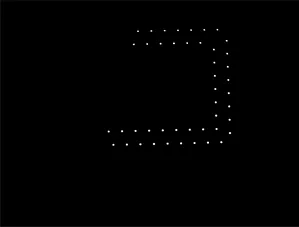
编辑: 校准目标可以在视野的任何区域进行定位。以下是我使用OpenCV过程获得的最佳结果:
169,367 748,345
167,557 820,788
165,690 893,158
164,047 965,197
162,715 1036,729
161,575 1108,089
160,477 1179,552
233,297 1015,313
232,076 1086,965
220,359 1229,578
268,494 1160,275
339,544 1162,980
362,017 1235,669
433,390 1238,491
482,754 1168,299
505,233 1241,039
554,856 1170,664
577,302 1243,439
627,331 1172,795
649,507 1245,665
713,572 588,896
711,995 661,853
710,440 735,034
708,722 808,856
707,018 882,674
705,377 956,169
703,609 1029,211
701,716 1101,950
699,760 1174,689
721,895 1247,620
785,829 614,754
784,344 687,750
782,819 761,315
781,292 835,225
779,389 908,975
777,619 982,335
775,688 1055,275
773,672 1128,091
771,603 1200,724
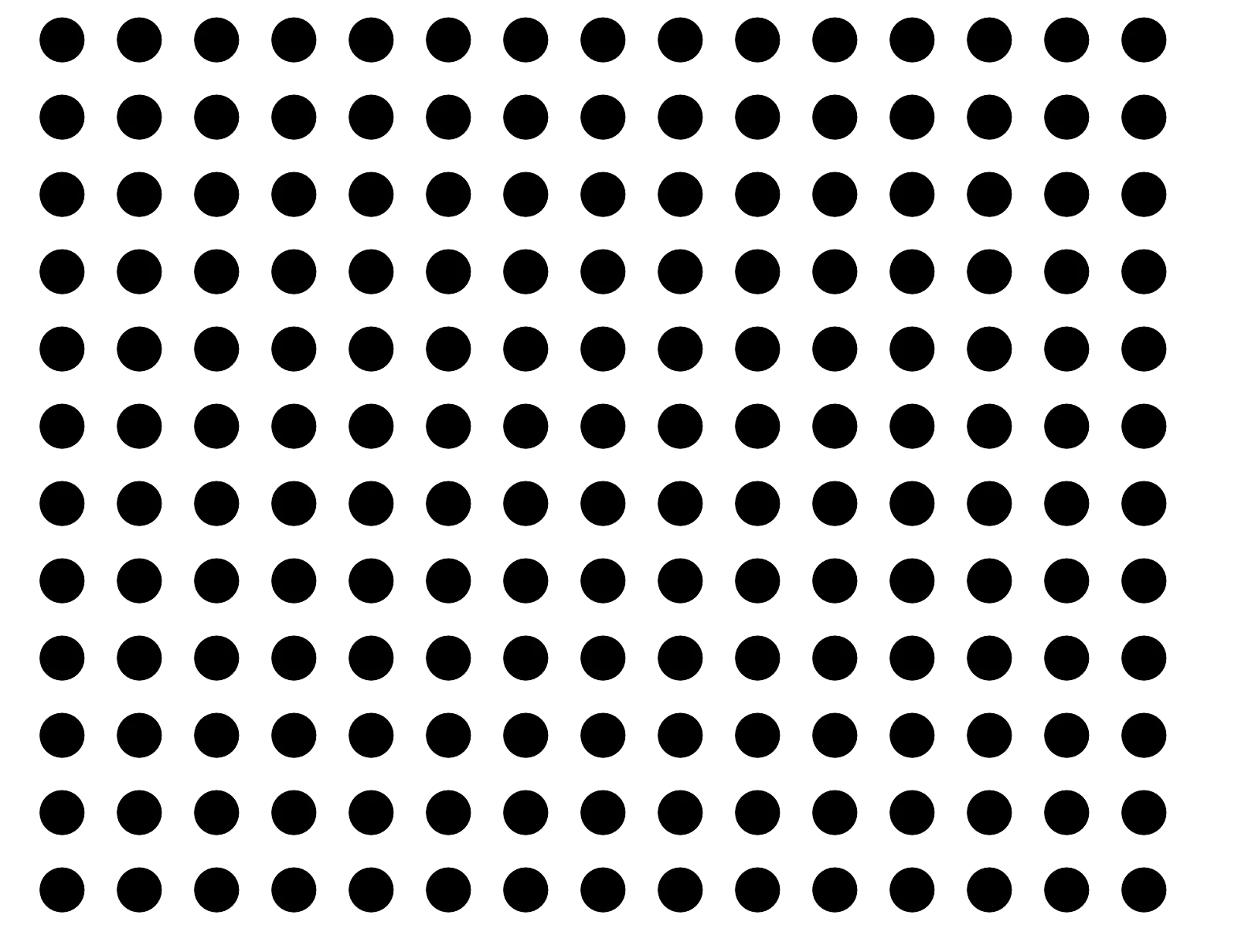
编辑后:数值生成的模型和中心点的真实坐标:
51,1 79,8
51,1 179,8
51,1 279,8
51,1 379,8
51,1 479,8
51,1 579,8
51,1 679,8
51,1 779,8
51,1 879,8
51,1 979,8
51,1 1079,8
51,1 1179,8
51,1 1279,8
51,1 1379,8
51,1 1479,8
151,1 79,8
151,1 179,8
151,1 279,8
151,1 379,8
151,1 479,8
151,1 579,8
151,1 679,8
151,1 779,8
151,1 879,8
151,1 979,8
151,1 1079,8
151,1 1179,8
151,1 1279,8
151,1 1379,8
151,1 1479,8
251,1 79,8
251,1 179,8
251,1 279,8
251,1 379,8
251,1 479,8
251,1 579,8
251,1 679,8
251,1 779,8
251,1 879,8
251,1 979,8
251,1 1079,8
251,1 1179,8
251,1 1279,8
251,1 1379,8
251,1 1479,8
351,1 79,8
351,1 179,8
351,1 279,8
351,1 379,8
351,1 479,8
351,1 579,8
351,1 679,8
351,1 779,8
351,1 879,8
351,1 979,8
351,1 1079,8
351,1 1179,8
351,1 1279,8
351,1 1379,8
351,1 1479,8
451,1 79,8
451,1 179,8
451,1 279,8
451,1 379,8
451,1 479,8
451,1 579,8
451,1 679,8
451,1 779,8
451,1 879,8
451,1 979,8
451,1 1079,8
451,1 1179,8
451,1 1279,8
451,1 1379,8
451,1 1479,8
551,1 79,8
551,1 179,8
551,1 279,8
551,1 379,8
551,1 479,8
551,1 579,8
551,1 679,8
551,1 779,8
551,1 879,8
551,1 979,8
551,1 1079,8
551,1 1179,8
551,1 1279,8
551,1 1379,8
551,1 1479,8
651,1 79,8
651,1 179,8
651,1 279,8
651,1 379,8
651,1 479,8
651,1 579,8
651,1 679,8
651,1 779,8
651,1 879,8
651,1 979,8
651,1 1079,8
651,1 1179,8
651,1 1279,8
651,1 1379,8
651,1 1479,8
751,1 79,8
751,1 179,8
751,1 279,8
751,1 379,8
751,1 479,8
751,1 579,8
751,1 679,8
751,1 779,8
751,1 879,8
751,1 979,8
751,1 1079,8
751,1 1179,8
751,1 1279,8
751,1 1379,8
751,1 1479,8
851,1 79,8
851,1 179,8
851,1 279,8
851,1 379,8
851,1 479,8
851,1 579,8
851,1 679,8
851,1 779,8
851,1 879,8
851,1 979,8
851,1 1079,8
851,1 1179,8
851,1 1279,8
851,1 1379,8
851,1 1479,8
951,1 79,8
951,1 179,8
951,1 279,8
951,1 379,8
951,1 479,8
951,1 579,8
951,1 679,8
951,1 779,8
951,1 879,8
951,1 979,8
951,1 1079,8
951,1 1179,8
951,1 1279,8
951,1 1379,8
951,1 1479,8
1051,1 79,8
1051,1 179,8
1051,1 279,8
1051,1 379,8
1051,1 479,8
1051,1 579,8
1051,1 679,8
1051,1 779,8
1051,1 879,8
1051,1 979,8
1051,1 1079,8
1051,1 1179,8
1051,1 1279,8
1051,1 1379,8
1051,1 1479,8
1151,1 79,8
1151,1 179,8
1151,1 279,8
1151,1 379,8
1151,1 479,8
1151,1 579,8
1151,1 679,8
1151,1 779,8
1151,1 879,8
1151,1 979,8
1151,1 1079,8
1151,1 1179,8
1151,1 1279,8
1151,1 1379,8
1151,1 1479,8
 编辑2
编辑2