根据您提供的示例图像,似乎您的圆形具有几乎恒定的半径。如果它们的半径不能低于一定数量的像素,则可以利用圆的简单几何来尝试图像空间方法。
想象一下,您将渲染表面划分为一个网格,以便最小的渲染圆可以像这样适合网格:
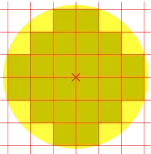
圆的半径为sqrt(10)格,覆盖至少21个正方形,因此如果您将任何圆完全重叠的正方形标记为已绘制,则将消除大约21/10pi圆面积的部分,即约为2/3。
您可以通过
这里了解最佳圆覆盖的一些想法。
剔除过程看起来有点像一个反向绘画算法:
For each circle from closest to farthest
if all squares overlapped (even partially) by the circle are painted
eliminate the circle
else
paint the squares totally overlapped by the circle
您还可以通过在给定圆形未完全覆盖的网格方块上涂色(或消除从已涂面积中略微溢出的圆形),以增加消除圆形的数量,以换取一些误报来“作弊”。
然后,您可以使用Z缓冲算法(即让GPU完成其余工作)来呈现剩余的圆形。
CPU方法
这假设您将网格实现为内存位图,没有GPU的帮助。
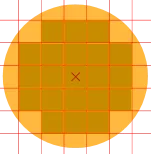
要确定要绘制的正方形,您可以使用基于圆心与网格距离(示例图像中的红色十字)和实际圆半径的预计算模式。
如果直径的相对变化足够小,则可以定义一个二维表,该表由圆半径和距离最近网格点的中心索引。
检索到正确的模式后,您可以使用简单的对称性将其应用于适当的位置。
相同的原理也可用于检查圆是否适合已涂面。
基于GPU方法
我很久以前就开始从事计算机图形学了,但是如果当前的技术允许,您可以让GPU为您绘制。
将网格绘制出来可以通过渲染每个圆并按比例缩放以适应网格来实现
检查消除需要读取包含圆的所有像素值(按网格尺寸缩放)。
效率
网格尺寸应该有一个最佳点。更密集的网格将覆盖更高比例的圆面积,从而消除更多圆(减少误判),但计算成本将以o(1/grid_step²)增长。
当然,如果渲染的圆可以缩小到大约1像素直径,那么你也可以放弃整个算法,让GPU来处理。但与基于GPU像素的方法相比,效率随着网格步长的平方增长。
在我的示例中使用网格,您可以预期对于完全随机的圆集合,大约有1/3的误判。
对于您的图片,似乎定义了体积,应该消除2/3的前景圆和(几乎)所有后向圆。消除超过80%的圆可能值得努力。
话虽如此,在暴力计算竞赛中很难击败GPU,因此我只有最模糊的想法关于实际性能收益。不过尝试一下可能很有趣。