我有一个单一校准相机,对着不同位置的棋盘进行拍摄。
以下是需要知道的内容:
如何估计所有图像中棋盘的三维点?
我认为OpenCV有一个函数可以完成此任务,但我不明白如何使用它!
以下是2个函数: 如何使用OpenCV计算三维点?
以下是需要知道的内容:
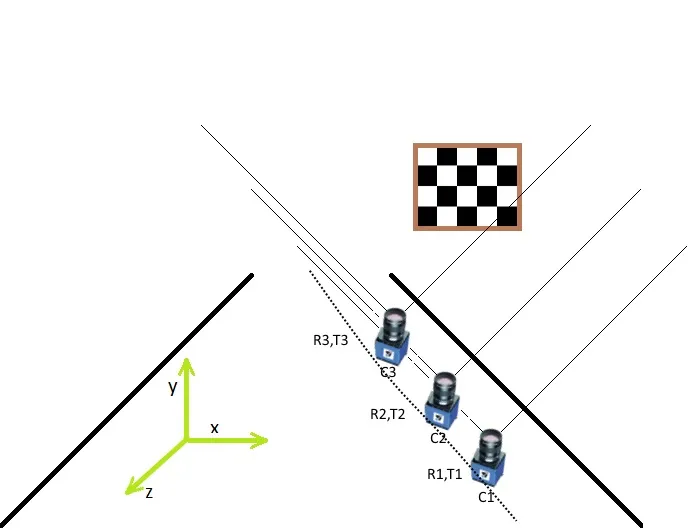
- 相机内参。fx,fy,cx,cy。
- 畸变系数 K1,K2,K3,T1,T2等。
- 相机旋转和平移(R,T)通过IMU。(即:惯性测量单元)
如何估计所有图像中棋盘的三维点?
我认为OpenCV有一个函数可以完成此任务,但我不明白如何使用它!
以下是2个函数: 如何使用OpenCV计算三维点?