我已经根据Wald和Havran的论文On building fast kd-Trees for Ray Tracing, and on doing that in O(N log N)实现了基于SAH的kd-tree。请注意,我没有按照他们在最后提出的建议进行剪接和合并,只是使用了SAH部分。
我正在使用轴对齐立方体测试算法,其中每个面被分成两个三角形,因此总共有
假设节点遍历成本为
现在,我们依次通过每个轴,并通过候选分割平面进行逐步扫描,以查看拆分成本是否更便宜。第一个分割平面是
这种局部逼近很容易陷入局部最小值:由于局部贪心SAH高估了CV(p),即使正确的成本表明需要进一步细分,它也可能停止细分。特别地,局部逼近可能导致对需要从侧面拆分平面单元格的体素过早终止:许多场景(特别是建筑场景)包含以轴对齐框盒的形式呈现的几何体(例如灯具、桌子的腿或桌面等),在这种情况下,必须将侧面“削平”,直到暴露出空的内部。对于选择错误的参数或使用不同于我们使用的成本函数(特别是将恒定成本添加到叶估计中的函数),递归可能会过早地终止。虽然这种过早退出也可以以硬编码的方式避免,例如仅对非平面单元格执行自动终止测试,但我们建议遵循我们的公式,这样就不会发生过早退出。
我正在使用轴对齐立方体测试算法,其中每个面被分成两个三角形,因此总共有
N = 12个三角形。左下角顶点(即最靠近坐标轴的顶点)实际上位于原点。
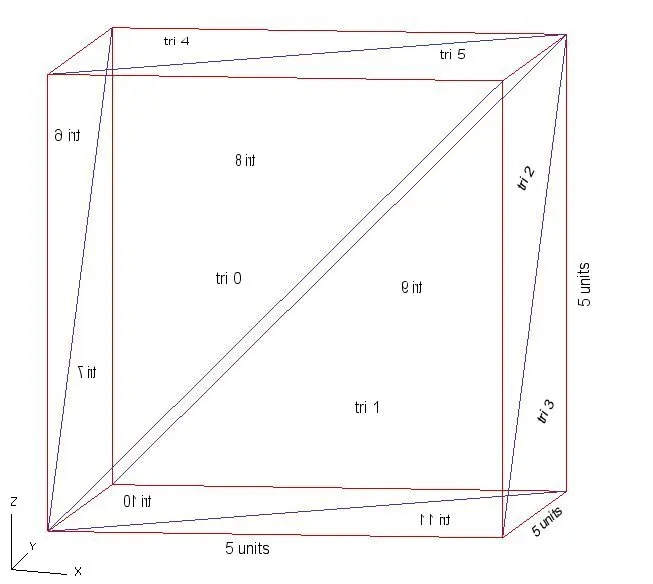
Face Triangle
----------------
Front: 0, 1
Left: 6, 7
Right: 2, 3
Top: 4, 5
Bottom: 10, 11
Back: 8, 9
假设节点遍历成本为
Ct = 1.0,交集成本为Ci = 10.0。我们首先找到不分割的成本,即Cns = N * Ci = 12 * 10.0 = 120.0。现在,我们依次通过每个轴,并通过候选分割平面进行逐步扫描,以查看拆分成本是否更便宜。第一个分割平面是
p = <x,0>。我们有Nl = 0,Np = 2和Nr = 10(即,在平面左侧、平面上和平面右侧的三角形数)。平面上的两个三角形是6号和7号(左侧面)。其他的都在右侧。
现在执行SAH(p,V,Nl,Nr,Np)函数。它需要分割平面、要分割的体素V以及左/右/平面三角形数量。它计算命中左(平坦)体素的概率为Pl = SA(Vl)/SA(V) = 50/150 = 1/3,右侧概率为Pr = SA(Vr)/SA(V) = 150/150 = 1。现在它运行两次成本函数;首先是左侧平面三角形,然后是右侧平面三角形,分别得到Cl和Cr。
成本函数C(Pl,Pr,Nl,Nr)返回bias * (Ct + Ci(Pl * Nl + Pr * Nr))
Cl:左侧平面三角形成本(Nl=2, Nr=10)
bias = 1 我们不进行偏置,因为左右体素都不为空。
Cl = 1 * (1 + 10(1/3 * 2 + 1 * 10)) = 107.666
Cr: 右侧平面三角形的成本 (Nl = 0, Nr = 12)
bias = 0.8 空单元格偏差发挥作用。
Cr = 0.8 * (1 + 10(1/3 * 0 + 1 * 12)) = 96.8
Cr = 96.8 比将两个三角形分离成一个平面单元 Cl = 107.666 更好,也比不分割体素 Cns = 120.0 更好。没有其他更便宜的候选分割。因此,我们将其分成一个空的左子节点和一个包含所有三角形的右子节点。当我们递归进入右子节点继续构建树时,我们执行与上述完全相同的步骤。仅仅因为有一个最大深度终止准则,这才不会导致堆栈溢出。结果树非常深。
论文声称已经考虑过这种情况:
在剪裁期间,必须特别注意正确处理特殊情况,例如“平面”(即体积为零)单元格,或可能发生数值不准确的情况(例如与三角形大小相比非常薄的单元格)。例如,我们必须确保不要“剪掉”位于平面单元格中的三角形。请注意,这些情况并不是罕见的异常情况,而实际上是由SAH鼓励的,因为它们经常产生最小的预期成本。这种局部逼近很容易陷入局部最小值:由于局部贪心SAH高估了CV(p),即使正确的成本表明需要进一步细分,它也可能停止细分。特别地,局部逼近可能导致对需要从侧面拆分平面单元格的体素过早终止:许多场景(特别是建筑场景)包含以轴对齐框盒的形式呈现的几何体(例如灯具、桌子的腿或桌面等),在这种情况下,必须将侧面“削平”,直到暴露出空的内部。对于选择错误的参数或使用不同于我们使用的成本函数(特别是将恒定成本添加到叶估计中的函数),递归可能会过早地终止。虽然这种过早退出也可以以硬编码的方式避免,例如仅对非平面单元格执行自动终止测试,但我们建议遵循我们的公式,这样就不会发生过早退出。
我有做错什么吗?我该如何纠正这个问题?