我正在学习计算机视觉模块中的边缘检测。我试图理解梯度方向和梯度大小的含义。
2个回答
120
根据Dima在他的answer中所解释的,为了更好地理解图像处理领域中的梯度,您应该熟悉数学概念gradient。
我的答案基于mevatron对这个question的answer。
这里有一个简单的初始图像,一个白色圆盘在黑色背景上:
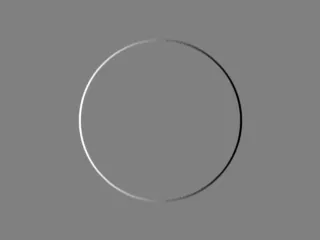
下面的图片展示了水平分量:
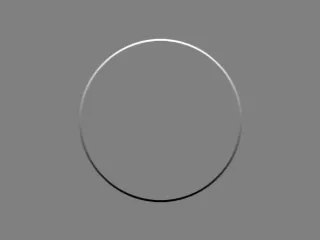
我们可以对于垂直分量做类似的观察,它展示了图像在竖直方向上的变化情况,即从上到下扫描图像。
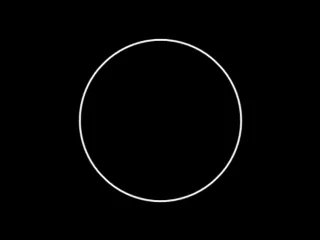
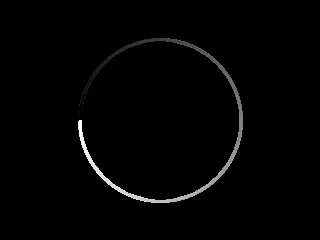
以下图像是梯度的大小:
下面的图像是梯度的方向:
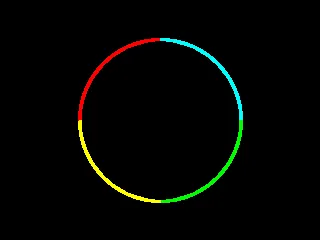
红色:角度在0到90度之间
青色:角度在90到180度之间
绿色:角度在180到270度之间
黄色:角度在270到360度之间
以下是生成上述图像的C++ OpenCV代码。
请注意,为了计算方向,我使用
cv::phase函数,如doc所解释的那样,当梯度的垂直分量和水平分量都为零时,该函数会给出一个0度的角度;这可能很方便,但从数学角度来看是错误的,因为当两个分量都为零时,方向未定义,而在浮点C++类型中保留方向的唯一有意义的值是NaN。这是明显错误的,因为0度方向已经与水平边缘相关联,不能用于表示没有边缘的区域,因此方向在该区域中是没有意义的。
// original code by https://stackoverflow.com/users/951860/mevatron
// see https://dev59.com/8WXWa4cB1Zd3GeqPLEKS#11157426
// https://stackoverflow.com/users/15485/uvts-cvs added the code for saving x and y gradient component
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <vector>
using namespace cv;
using namespace std;
Mat mat2gray(const cv::Mat& src)
{
Mat dst;
normalize(src, dst, 0.0, 255.0, cv::NORM_MINMAX, CV_8U);
return dst;
}
Mat orientationMap(const cv::Mat& mag, const cv::Mat& ori, double thresh = 1.0)
{
Mat oriMap = Mat::zeros(ori.size(), CV_8UC3);
Vec3b red(0, 0, 255);
Vec3b cyan(255, 255, 0);
Vec3b green(0, 255, 0);
Vec3b yellow(0, 255, 255);
for(int i = 0; i < mag.rows*mag.cols; i++)
{
float* magPixel = reinterpret_cast<float*>(mag.data + i*sizeof(float));
if(*magPixel > thresh)
{
float* oriPixel = reinterpret_cast<float*>(ori.data + i*sizeof(float));
Vec3b* mapPixel = reinterpret_cast<Vec3b*>(oriMap.data + i*3*sizeof(char));
if(*oriPixel < 90.0)
*mapPixel = red;
else if(*oriPixel >= 90.0 && *oriPixel < 180.0)
*mapPixel = cyan;
else if(*oriPixel >= 180.0 && *oriPixel < 270.0)
*mapPixel = green;
else if(*oriPixel >= 270.0 && *oriPixel < 360.0)
*mapPixel = yellow;
}
}
return oriMap;
}
int main(int argc, char* argv[])
{
Mat image = Mat::zeros(Size(320, 240), CV_8UC1);
circle(image, Point(160, 120), 80, Scalar(255, 255, 255), -1, CV_AA);
imshow("original", image);
Mat Sx;
Sobel(image, Sx, CV_32F, 1, 0, 3);
Mat Sy;
Sobel(image, Sy, CV_32F, 0, 1, 3);
Mat mag, ori;
magnitude(Sx, Sy, mag);
phase(Sx, Sy, ori, true);
Mat oriMap = orientationMap(mag, ori, 1.0);
imshow("x", mat2gray(Sx));
imshow("y", mat2gray(Sy));
imwrite("hor.png",mat2gray(Sx));
imwrite("ver.png",mat2gray(Sy));
imshow("magnitude", mat2gray(mag));
imshow("orientation", mat2gray(ori));
imshow("orientation map", oriMap);
waitKey();
return 0;
}
- Alessandro Jacopson
5
25
函数的梯度是关于两个变量x和y的偏导数的向量。因此,如果你的函数是f(x,y),梯度就是向量(f_x, f_y)。图像是关于(x,y)的离散函数,所以你也可以谈论图像的梯度。
图像的梯度有两个分量:x方向的导数和y方向的导数。因此,你可以将其看作在每个像素点上定义的向量(f_x, f_y)。这些向量有一个方向atan(f_y / fx)和一个大小sqrt(f_x^2 + f_y^2)。因此,你可以将图像的梯度表示为x导数图像和y导数图像,或者作为方向图像和大小图像。
图像的梯度有两个分量:x方向的导数和y方向的导数。因此,你可以将其看作在每个像素点上定义的向量(f_x, f_y)。这些向量有一个方向atan(f_y / fx)和一个大小sqrt(f_x^2 + f_y^2)。因此,你可以将图像的梯度表示为x导数图像和y导数图像,或者作为方向图像和大小图像。
- Dima
网页内容由stack overflow 提供, 点击上面的可以查看英文原文,
原文链接
原文链接
x是某个特定像素的水平梯度分量,而y是垂直分量。那么该像素的梯度幅值M为M=sqrt(pow(x,2)+pow(y,2)),如果只知道M,似乎很难推出x和y。 - Alessandro Jacopson