概述:
 这是一个最小化的工作示例,改编自基本的learnopengl教程。
这是一个最小化的工作示例,改编自基本的learnopengl教程。
#include <glad/glad.h>
#include <GLFW/glfw3.h>
#define STB_IMAGE_IMPLEMENTATION
#include <stb_image.h>
#include <vector>
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <glm/gtc/type_ptr.hpp>
#include <learnopengl/shader_m.h>
#include <iostream>
void framebuffer_size_callback(GLFWwindow* window, int width, int height);
void mouse_callback(GLFWwindow* window, double xpos, double ypos);
void scroll_callback(GLFWwindow* window, double xoffset, double yoffset);
void processInput(GLFWwindow *window);
const unsigned int SCR_WIDTH = 800;
const unsigned int SCR_HEIGHT = 600;
glm::vec3 cameraPos = glm::vec3(0.0f, 0.0f, 3.0f);
glm::vec3 cameraFront = glm::vec3(0.0f, 0.0f, -1.0f);
glm::vec3 cameraUp = glm::vec3(0.0f, 1.0f, 0.0f);
glm::mat4 projection;
glm::mat4 view;
bool firstMouse = true;
float yaw = -90.0f;
float pitch = 0.0f;
float lastX = 800.0f / 2.0;
float lastY = 600.0 / 2.0;
float fov = 45.0f;
float deltaTime = 0.0f;
float lastFrame = 0.0f;
float pointPlaneDistance(const glm::vec3 &point, const glm::vec3 &planePosition, const glm::vec3 &planeNormal);
bool isMinkowskiFace(const glm::vec3 &a, const glm::vec3 &b, const glm::vec3 &b_x_a, const glm::vec3 &c, const glm::vec3 &d, const glm::vec3 &d_x_c);
class Edge {
public:
glm::vec3 v0;
glm::vec3 v1;
std::vector<int> face_indices;
Edge(const glm::vec3 &v0, const glm::vec3 &v1);
};
class Face {
public:
std::vector<glm::vec3> vertices;
glm::vec3 position;
glm::vec3 normal;
Face(const glm::vec3 &v0, const glm::vec3 &v1, const glm::vec3 &v2);
};
class Body {
public:
glm::vec3 cm_position;
std::vector<glm::vec3> vertices;
std::vector<Edge> edges;
std::vector<Face> faces;
Body();
int update(const std::vector<glm::vec3> &vertices);
};
class Query {
public:
float max_seperation;
std::vector<int> max_index;
glm::vec3 best_axis;
int type;
Query(float max_seperation, std::vector<int> best_index, glm::vec3 best_axis) {
this->max_seperation = max_seperation;
this->max_index = max_index;
this->best_axis = best_axis;
}
};
std::vector<Query> SAT(const Body &hullA, const Body &hullB);
float pointPlaneDistance(const glm::vec3 &point, const glm::vec3 &planePosition, const glm::vec3 &planeNormal) {
return glm::dot(point - planePosition, planeNormal);
}
bool isMinkowskiFace(const glm::vec3 &a, const glm::vec3 &b, const glm::vec3 &b_x_a, const glm::vec3 &c, const glm::vec3 &d, const glm::vec3 &d_x_c) {
float cba = glm::dot(c, b_x_a);
float dba = glm::dot(d, b_x_a);
float adc = glm::dot(a, d_x_c);
float bdc = glm::dot(b, d_x_c);
return cba * dba < 0.0f && adc * bdc < 0.0f && cba * bdc > 0.0f;
}
Face::Face(const glm::vec3 &v0, const glm::vec3 &v1, const glm::vec3 &v2) {
this->vertices = {v0, v1, v2};
this->position = v0;
this->normal = glm::normalize(glm::cross(v0 - v2, v1 - v0));
}
Edge::Edge(const glm::vec3 &v0, const glm::vec3 &v1) {
this->v0 = v0;
this->v1 = v1;
}
Body::Body() {
this->vertices = {};
this->edges = {};
this->faces = {};
this->cm_position = glm::vec3(0,0,0);
}
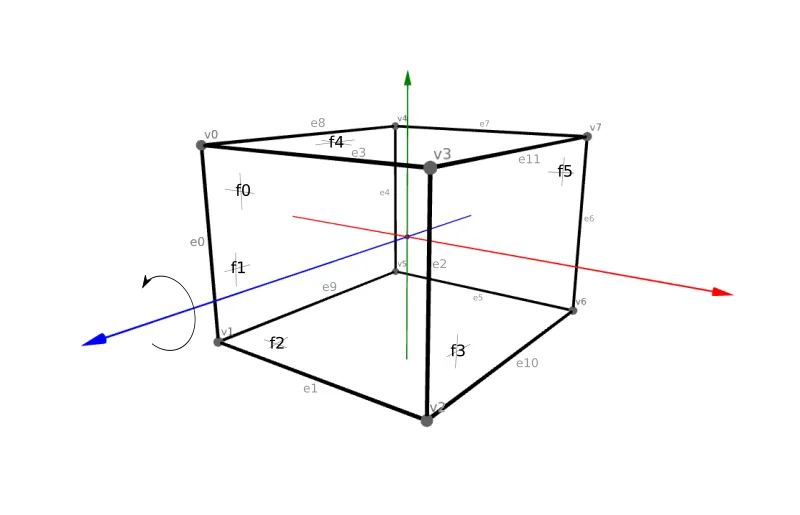
int Body::update(const std::vector<glm::vec3> &v) {
this->faces = {
Face(v.at(0), v.at(1), v.at(2)),
Face(v.at(4), v.at(5), v.at(1)),
Face(v.at(1), v.at(5), v.at(6)),
Face(v.at(3), v.at(2), v.at(6)),
Face(v.at(7), v.at(4), v.at(0)),
Face(v.at(7), v.at(6), v.at(5)),
};
this->edges = {
Edge(v.at(0), v.at(1)),
Edge(v.at(1), v.at(2)),
Edge(v.at(2), v.at(3)),
Edge(v.at(3), v.at(0)),
Edge(v.at(4), v.at(5)),
Edge(v.at(5), v.at(6)),
Edge(v.at(6), v.at(7)),
Edge(v.at(7), v.at(4)),
Edge(v.at(4), v.at(0)),
Edge(v.at(5), v.at(1)),
Edge(v.at(6), v.at(2)),
Edge(v.at(7), v.at(3)),
};
this->edges[0].face_indices = {0, 1};
this->edges[1].face_indices = {0, 2};
this->edges[2].face_indices = {0, 3};
this->edges[3].face_indices = {0, 4};
this->edges[4].face_indices = {1, 5};
this->edges[5].face_indices = {2, 5};
this->edges[6].face_indices = {3, 5};
this->edges[7].face_indices = {4, 5};
this->edges[8].face_indices = {1, 4};
this->edges[9].face_indices = {1, 2};
this->edges[10].face_indices = {2, 3};
this->edges[11].face_indices = {3, 4};
this->vertices = v;
return 0;
}
glm::vec3 get_support(const std::vector<glm::vec3> &vertices, glm::vec3 n) {
glm::vec3 _v;
float _d = -FLT_MAX;
for (unsigned int i = 0; i < vertices.size(); i++) {
glm::vec3 v = vertices.at(i);
float d = glm::dot(v, n);
if ( d > _d) {
_d = d;
_v = v;
}
}
return _v;
}
Query query_face_directions(const Body &hullA, const Body &hullB) {
float max_seperation = -FLT_MAX;
std::vector<int> max_index;
max_index.push_back(-1);
max_index.push_back(-1);
glm::vec3 best_axis;
for (int i = 0; i < hullA.faces.size(); i++) {
Face f = hullA.faces.at(i);
glm::vec3 support_point = get_support(hullB.vertices, f.normal * -1.0f);
float dist = pointPlaneDistance(support_point, f.position, f.normal);
if (dist > max_seperation) {
max_index = {i, -1};
max_seperation = dist;
best_axis = f.normal;
}
}
return Query(max_seperation, max_index, best_axis);
}
Query query_edge_directions(const Body &hullA, const Body &hullB) {
float max_seperation = -FLT_MAX;
std::vector<int> max_index;
max_index.push_back(-1);
max_index.push_back(-1);
glm::vec3 best_axis;
for (int i = 0; i < hullA.edges.size(); i++) {
Edge edge_a = hullA.edges.at(i);
glm::vec3 edge_a_n1 = hullA.faces[edge_a.face_indices[0]].normal;
glm::vec3 edge_a_n2 = hullA.faces[edge_a.face_indices[1]].normal;
for (int j = 0; j < hullB.edges.size(); j++) {
Edge edge_b = hullB.edges.at(j);
glm::vec3 edge_b_n1 = hullB.faces[edge_b.face_indices[0]].normal;
glm::vec3 edge_b_n2 = hullB.faces[edge_b.face_indices[1]].normal;
bool builds_face = isMinkowskiFace(edge_a_n1, edge_a_n2, glm::cross(edge_a_n1, edge_a_n2), edge_b_n1 * -1.0f, edge_b_n2 * -1.0f, glm::cross(edge_b_n1 * -1.0f, edge_b_n2 * -1.0f));
if (!builds_face) {
continue;
}
glm::vec3 axis = glm::normalize(glm::cross(edge_a.v1 - edge_a.v0, edge_b.v1 - edge_b.v0));
if (glm::length(axis) < 0.0001f) {
continue;
}
if (glm::dot(axis, edge_a.v0 - hullA.cm_position) < 0.0f) {
axis = axis * -1.0f;
}
float dist1 = pointPlaneDistance(edge_b.v0, edge_a.v0, axis);
float dist2 = pointPlaneDistance(edge_b.v1, edge_a.v0, axis);
float dist;
if (dist1 > dist2) {
dist = dist1;
}
else {
dist = dist2;
}
if (max_seperation == -FLT_MAX || dist > max_seperation) {
max_index = {i,j};
max_seperation = dist;
best_axis = axis;
}
}
}
return Query(max_seperation, max_index, best_axis);
}
std::vector<Query> SAT(const Body &hullA, const Body &hullB) {
Query edge_query = query_edge_directions(hullA, hullB);
if (edge_query.max_seperation > 0.0f) {
edge_query.type = 0;
return {edge_query};
}
Query face_query_a = query_face_directions(hullA, hullB);
if (face_query_a.max_seperation > 0.0f) {
face_query_a.type = 1;
return {face_query_a};
}
Query face_query_b = query_face_directions(hullA, hullB);
if (face_query_b.max_seperation > 0.0f) {
face_query_b.type = 2;
return {face_query_b};
}
bool face_contact_a = face_query_a.max_seperation > edge_query.max_seperation;
bool face_contact_b = face_query_b.max_seperation > edge_query.max_seperation;
if (face_contact_a && face_contact_b) {
face_query_a.type = 1;
face_query_b.type = 2;
return {face_query_a, face_query_b};
} else {
edge_query.type = 0;
return {edge_query};
}
}
int main()
{
glfwInit();
glfwWindowHint(GLFW_CONTEXT_VERSION_MAJOR, 3);
glfwWindowHint(GLFW_CONTEXT_VERSION_MINOR, 3);
glfwWindowHint(GLFW_OPENGL_PROFILE, GLFW_OPENGL_CORE_PROFILE);
#ifdef __APPLE__
glfwWindowHint(GLFW_OPENGL_FORWARD_COMPAT, GL_TRUE);
#endif
GLFWwindow* window = glfwCreateWindow(SCR_WIDTH, SCR_HEIGHT, "LearnOpenGL", NULL, NULL);
if (window == NULL)
{
std::cout << "Failed to create GLFW window" << std::endl;
glfwTerminate();
return -1;
}
glfwMakeContextCurrent(window);
glfwSetFramebufferSizeCallback(window, framebuffer_size_callback);
glfwSetCursorPosCallback(window, mouse_callback);
glfwSetScrollCallback(window, scroll_callback);
glfwSetInputMode(window, GLFW_CURSOR, GLFW_CURSOR_DISABLED);
if (!gladLoadGLLoader((GLADloadproc)glfwGetProcAddress))
{
std::cout << "Failed to initialize GLAD" << std::endl;
return -1;
}
glEnable(GL_DEPTH_TEST);
Shader ourShader("7.3.camera.vs", "7.3.camera.fs");
float vertices[] = {
-0.5f, -0.5f, -0.5f, 0.0f, 0.0f,
0.5f, -0.5f, -0.5f, 1.0f, 0.0f,
0.5f, 0.5f, -0.5f, 1.0f, 1.0f,
0.5f, 0.5f, -0.5f, 1.0f, 1.0f,
-0.5f, 0.5f, -0.5f, 0.0f, 1.0f,
-0.5f, -0.5f, -0.5f, 0.0f, 0.0f,
-0.5f, -0.5f, 0.5f, 0.0f, 0.0f,
0.5f, -0.5f, 0.5f, 1.0f, 0.0f,
0.5f, 0.5f, 0.5f, 1.0f, 1.0f,
0.5f, 0.5f, 0.5f, 1.0f, 1.0f,
-0.5f, 0.5f, 0.5f, 0.0f, 1.0f,
-0.5f, -0.5f, 0.5f, 0.0f, 0.0f,
-0.5f, 0.5f, 0.5f, 1.0f, 0.0f,
-0.5f, 0.5f, -0.5f, 1.0f, 1.0f,
-0.5f, -0.5f, -0.5f, 0.0f, 1.0f,
-0.5f, -0.5f, -0.5f, 0.0f, 1.0f,
-0.5f, -0.5f, 0.5f, 0.0f, 0.0f,
-0.5f, 0.5f, 0.5f, 1.0f, 0.0f,
0.5f, 0.5f, 0.5f, 1.0f, 0.0f,
0.5f, 0.5f, -0.5f, 1.0f, 1.0f,
0.5f, -0.5f, -0.5f, 0.0f, 1.0f,
0.5f, -0.5f, -0.5f, 0.0f, 1.0f,
0.5f, -0.5f, 0.5f, 0.0f, 0.0f,
0.5f, 0.5f, 0.5f, 1.0f, 0.0f,
-0.5f, -0.5f, -0.5f, 0.0f, 1.0f,
0.5f, -0.5f, -0.5f, 1.0f, 1.0f,
0.5f, -0.5f, 0.5f, 1.0f, 0.0f,
0.5f, -0.5f, 0.5f, 1.0f, 0.0f,
-0.5f, -0.5f, 0.5f, 0.0f, 0.0f,
-0.5f, -0.5f, -0.5f, 0.0f, 1.0f,
-0.5f, 0.5f, -0.5f, 0.0f, 1.0f,
0.5f, 0.5f, -0.5f, 1.0f, 1.0f,
0.5f, 0.5f, 0.5f, 1.0f, 0.0f,
0.5f, 0.5f, 0.5f, 1.0f, 0.0f,
-0.5f, 0.5f, 0.5f, 0.0f, 0.0f,
-0.5f, 0.5f, -0.5f, 0.0f, 1.0f
};
glm::vec3 cubePositions[] = {
glm::vec3( 0.0f, 0.0f, 0.0f),
glm::vec3( 2.0f, 5.0f, -15.0f),
glm::vec3(-1.5f, -2.2f, -2.5f),
glm::vec3(-3.8f, -2.0f, -12.3f),
glm::vec3( 2.4f, -0.4f, -3.5f),
glm::vec3(-1.7f, 3.0f, -7.5f),
glm::vec3( 1.3f, -2.0f, -2.5f),
glm::vec3( 1.5f, 2.0f, -2.5f),
glm::vec3( 1.5f, 0.2f, -1.5f),
glm::vec3(-1.3f, 1.0f, -1.5f)
};
unsigned int VBO, VAO;
glGenVertexArrays(1, &VAO);
glGenBuffers(1, &VBO);
glBindVertexArray(VAO);
glBindBuffer(GL_ARRAY_BUFFER, VBO);
glBufferData(GL_ARRAY_BUFFER, sizeof(vertices), vertices, GL_STATIC_DRAW);
glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, 5 * sizeof(float), (void*)0);
glEnableVertexAttribArray(0);
glVertexAttribPointer(1, 2, GL_FLOAT, GL_FALSE, 5 * sizeof(float), (void*)(3 * sizeof(float)));
glEnableVertexAttribArray(1);
unsigned int texture1, texture2;
glGenTextures(1, &texture1);
glBindTexture(GL_TEXTURE_2D, texture1);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
int width, height, nrChannels;
stbi_set_flip_vertically_on_load(true);
unsigned char *data = stbi_load("resources/textures/container.jpg", &width, &height, &nrChannels, 0);
if (data)
{
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGB, width, height, 0, GL_RGB, GL_UNSIGNED_BYTE, data);
glGenerateMipmap(GL_TEXTURE_2D);
}
else
{
std::cout << "Failed to load texture" << std::endl;
}
stbi_image_free(data);
glGenTextures(1, &texture2);
glBindTexture(GL_TEXTURE_2D, texture2);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_S, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_WRAP_T, GL_REPEAT);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MIN_FILTER, GL_LINEAR);
glTexParameteri(GL_TEXTURE_2D, GL_TEXTURE_MAG_FILTER, GL_LINEAR);
data = stbi_load("resources/textures/awesomeface.png", &width, &height, &nrChannels, 0);
if (data)
{
glTexImage2D(GL_TEXTURE_2D, 0, GL_RGB, width, height, 0, GL_RGBA, GL_UNSIGNED_BYTE, data);
glGenerateMipmap(GL_TEXTURE_2D);
}
else
{
std::cout << "Failed to load texture" << std::endl;
}
stbi_image_free(data);
ourShader.use();
ourShader.setInt("texture1", 0);
ourShader.setInt("texture2", 1);
while (!glfwWindowShouldClose(window))
{
float currentFrame = static_cast<float>(glfwGetTime());
deltaTime = currentFrame - lastFrame;
lastFrame = currentFrame;
processInput(window);
glClearColor(0.2f, 0.3f, 0.3f, 1.0f);
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glActiveTexture(GL_TEXTURE0);
glBindTexture(GL_TEXTURE_2D, texture1);
glActiveTexture(GL_TEXTURE1);
glBindTexture(GL_TEXTURE_2D, texture2);
ourShader.use();
projection = glm::perspective(glm::radians(fov), (float)SCR_WIDTH / (float)SCR_HEIGHT, 0.1f, 100.0f);
ourShader.setMat4("projection", projection);
view = glm::lookAt(cameraPos, cameraPos + cameraFront, cameraUp);
ourShader.setMat4("view", view);
float nearDist = 0.1f;
float farDist = 100.0f;
float ar = (float)SCR_WIDTH / (float)SCR_HEIGHT;
float Hnear = 2 * tan(glm::radians(fov/2)) * nearDist;
float Wnear = Hnear * ar;
float Hfar = 2 * tan(glm::radians(fov/2)) * farDist;
float Wfar = Hfar * ar;
glm::vec3 Cnear = cameraPos + glm::normalize(cameraFront) * nearDist;
glm::vec3 Cfar = cameraPos + glm::normalize(cameraFront) * farDist;
glm::vec3 cameraRight = glm::cross(cameraFront, cameraUp);
glm::vec3 topRightFar = Cfar + (cameraUp * (Hfar / 2)) + (cameraRight * (Wfar / 2));
glm::vec3 bottomRightFar = Cfar - (cameraUp * (Hfar / 2)) + (cameraRight * (Wfar / 2));
glm::vec3 topLeftFar = Cfar + (cameraUp * (Hfar / 2)) - (cameraRight * (Wfar / 2));
glm::vec3 bottomLeftFar = Cfar - (cameraUp * (Hfar / 2)) - (cameraRight * (Wfar / 2));
glm::vec3 topRightNear = Cnear + (cameraUp * (Hnear / 2)) + (cameraRight * (Wnear / 2));
glm::vec3 topLeftNear = Cnear + (cameraUp * (Hnear / 2)) - (cameraRight * (Wnear / 2));
glm::vec3 bottomLeftNear = Cnear - (cameraUp * (Hnear /2)) - (cameraRight * (Wnear / 2));
glm::vec3 bottomRightNear = Cnear - (cameraUp * (Hnear /2)) + (cameraRight * (Wnear / 2));
glm::vec3 aux = glm::normalize((Cnear + cameraRight * (float)(Wnear / 2)) - cameraPos);
glm::vec3 rightNormal = glm::normalize(glm::cross(aux, cameraUp));
aux = glm::normalize((Cnear - cameraRight * (float)(Wnear / 2)) - cameraPos);
glm::vec3 leftNormal = glm::normalize(glm::cross(aux, cameraUp));
aux = glm::normalize((Cnear + cameraUp * (float)(Hnear / 2)) - cameraPos);
glm::vec3 topNormal = glm::normalize(glm::cross(aux, cameraRight));
aux = glm::normalize((Cnear - cameraUp * (float)(Hnear / 2)) - cameraPos);
glm::vec3 bottomNormal = glm::normalize(glm::cross(aux, cameraRight));
glm::vec3 backNormal = cameraFront;
glm::vec3 frontNormal = -1.0f * cameraFront;
Body frustum_body;
frustum_body.update({topLeftNear, bottomLeftNear, bottomRightNear, topRightNear, topLeftFar, bottomLeftFar, bottomRightFar, topRightFar});
glBindVertexArray(VAO);
int meshesCulled = 0;
for (unsigned int i = 0; i < 10; i++)
{
glm::mat4 model = glm::mat4(1.0f);
model = glm::translate(model, cubePositions[i]);
float angle = 20.0f * i;
model = glm::rotate(model, glm::radians(angle), glm::vec3(1.0f, 0.3f, 0.5f));
Body box_body;
std::vector<float> aabb = {-0.5f, -0.5f, -0.5f, 0.5f, 0.5f, 0.5f};
glm::vec3 _min = glm::vec3(aabb[0], aabb[1], aabb[2]);
glm::vec3 _max = glm::vec3(aabb[3], aabb[4], aabb[5]);
glm::vec3 v5 = glm::vec3(model * glm::vec4(_min.x, _min.y, _min.z, 1.0f));
glm::vec3 v3 = glm::vec3(model * glm::vec4(_max.x, _max.y, _max.z, 1.0f));
glm::vec3 v4 = glm::vec3(model * glm::vec4(_min.x, _max.y, _min.z, 1.0f));
glm::vec3 v6 = glm::vec3(model * glm::vec4(_max.x, _min.y, _min.z, 1.0f));
glm::vec3 v7 = glm::vec3(model * glm::vec4(_max.x, _max.y, _min.z, 1.0f));
glm::vec3 v2 = glm::vec3(model * glm::vec4(_max.x, _min.y, _max.z, 1.0f));
glm::vec3 v0 = glm::vec3(model * glm::vec4(_min.x, _max.y, _max.z, 1.0f));
glm::vec3 v1 = glm::vec3(model * glm::vec4(_min.x, _min.y, _max.z, 1.0f));
std::vector<glm::vec3> v = {v0, v1, v2, v3, v4, v5, v6, v7};
box_body.update(v);
box_body.cm_position = cubePositions[i];
std::vector<Query> queries = SAT(box_body, frustum_body);
float max_seperation = -FLT_MAX;
for (unsigned int i = 0; i < queries.size(); i++) {
Query query = queries[i];
if (query.max_seperation > max_seperation) {
max_seperation = query.max_seperation;
}
}
if (max_seperation > 0.0f) {
meshesCulled += 1;
} else {
ourShader.setMat4("model", model);
glDrawArrays(GL_TRIANGLES, 0, 36);
}
}
std::cout << 10 - meshesCulled << " of 10 meshes drawn!" << std::endl;
glfwSwapBuffers(window);
glfwPollEvents();
}
glDeleteVertexArrays(1, &VAO);
glDeleteBuffers(1, &VBO);
glfwTerminate();
return 0;
}
void processInput(GLFWwindow *window)
{
if (glfwGetKey(window, GLFW_KEY_ESCAPE) == GLFW_PRESS)
glfwSetWindowShouldClose(window, true);
float cameraSpeed = static_cast<float>(2.5 * deltaTime);
if (glfwGetKey(window, GLFW_KEY_W) == GLFW_PRESS)
cameraPos += cameraSpeed * cameraFront;
if (glfwGetKey(window, GLFW_KEY_S) == GLFW_PRESS)
cameraPos -= cameraSpeed * cameraFront;
if (glfwGetKey(window, GLFW_KEY_A) == GLFW_PRESS)
cameraPos -= glm::normalize(glm::cross(cameraFront, cameraUp)) * cameraSpeed;
if (glfwGetKey(window, GLFW_KEY_D) == GLFW_PRESS)
cameraPos += glm::normalize(glm::cross(cameraFront, cameraUp)) * cameraSpeed;
}
void framebuffer_size_callback(GLFWwindow* window, int width, int height)
{
glViewport(0, 0, width, height);
}
void mouse_callback(GLFWwindow* window, double xposIn, double yposIn)
{
float xpos = static_cast<float>(xposIn);
float ypos = static_cast<float>(yposIn);
if (firstMouse)
{
lastX = xpos;
lastY = ypos;
firstMouse = false;
}
float xoffset = xpos - lastX;
float yoffset = lastY - ypos;
lastX = xpos;
lastY = ypos;
float sensitivity = 0.1f;
xoffset *= sensitivity;
yoffset *= sensitivity;
yaw += xoffset;
pitch += yoffset;
if (pitch > 89.0f)
pitch = 89.0f;
if (pitch < -89.0f)
pitch = -89.0f;
glm::vec3 front;
front.x = cos(glm::radians(yaw)) * cos(glm::radians(pitch));
front.y = sin(glm::radians(pitch));
front.z = sin(glm::radians(yaw)) * cos(glm::radians(pitch));
cameraFront = glm::normalize(front);
}
void scroll_callback(GLFWwindow* window, double xoffset, double yoffset)
{
fov -= (float)yoffset;
if (fov < 1.0f)
fov = 1.0f;
if (fov > 45.0f)
fov = 45.0f;
}
控制台每帧打印被剔除的OBB数量: