言传身教,
以身作则。
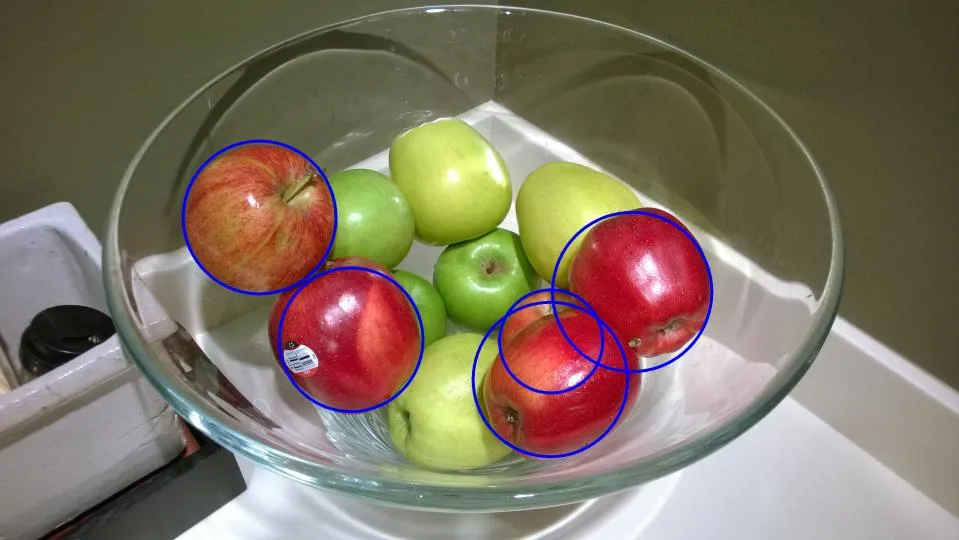
最好在交互式GUI演示中查看
可配置的UI面板允许通过移动几个滑块来调整参数
import sys
import cv2
import math
import numpy
from scipy.ndimage import label
pi_4 = 4*math.pi
def nothing_asCallback(x):
pass
def GUI_openCV_circles():
frame = cv2.imread( "openCV_CircleDetection_IMG_LASSO_AREA.JPG" )
demo = frame[:800,:800,:]
cv2.namedWindow( "DEMO.IN", cv2.cv.CV_WINDOW_AUTOSIZE )
cv2.namedWindow( "DEMO.Canny", cv2.cv.CV_WINDOW_AUTOSIZE )
cv2.namedWindow( "DEMO.Canny.Circles", cv2.cv.CV_WINDOW_AUTOSIZE )
aKeyPRESSED = None
aCanny_LoTreshold = 127
aCanny_LoTreshold_PREVIOUS = -1
aCanny_HiTreshold = 255
aCanny_HiTreshold_PREVIOUS = -1
aHough_dp = 1
aHough_dp_PREVIOUS = -1
aHough_minDistance = 10
aHough_minDistance_PREVIOUS = -1
aHough_param1_aCannyHiTreshold = 255
aHough_param1_aCannyHiTreshold_PREVIOUS = -1
aHough_param2_aCentreDetectTreshold = 20
aHough_param2_aCentreDetectTreshold_PREVIOUS = -1
aHough_minRadius = 10
aHough_minRadius_PREVIOUS = -1
aHough_maxRadius = 30
aHough_maxRadius_PREVIOUS = -1
cv2.createTrackbar( "Lo_Treshold", "DEMO.Canny", aCanny_LoTreshold, 255, nothing_asCallback )
cv2.createTrackbar( "Hi_Treshold", "DEMO.Canny", aCanny_HiTreshold, 255, nothing_asCallback )
cv2.createTrackbar( "dp", "DEMO.Canny.Circles", aHough_dp, 255, nothing_asCallback )
cv2.createTrackbar( "minDistance", "DEMO.Canny.Circles", aHough_minDistance, 255, nothing_asCallback )
cv2.createTrackbar( "param1_HiTreshold", "DEMO.Canny.Circles", aHough_param1_aCannyHiTreshold, 255, nothing_asCallback )
cv2.createTrackbar( "param2_CentreDetect", "DEMO.Canny.Circles", aHough_param2_aCentreDetectTreshold, 255, nothing_asCallback )
cv2.createTrackbar( "minRadius", "DEMO.Canny.Circles", aHough_minRadius, 255, nothing_asCallback )
cv2.createTrackbar( "maxRadius", "DEMO.Canny.Circles", aHough_maxRadius, 255, nothing_asCallback )
cv2.imshow( "DEMO.IN", demo )
print " --------------------------------------------------------------------------- press [ESC] to exit "
while( True ):
if aKeyPRESSED == 27:
break
aCanny_LoTreshold = cv2.getTrackbarPos( "Lo_Treshold", "DEMO.Canny" )
aCanny_HiTreshold = cv2.getTrackbarPos( "Hi_Treshold", "DEMO.Canny" )
if ( aCanny_LoTreshold != aCanny_LoTreshold_PREVIOUS
or aCanny_HiTreshold != aCanny_HiTreshold_PREVIOUS
):
aCannyRefreshFLAG = True
aCanny_LoTreshold_PREVIOUS = aCanny_LoTreshold
aCanny_HiTreshold_PREVIOUS = aCanny_HiTreshold
else:
aCannyRefreshFLAG = False
aHough_dp = cv2.getTrackbarPos( "dp", "DEMO.Canny.Circles" )
aHough_minDistance = cv2.getTrackbarPos( "minDistance", "DEMO.Canny.Circles" )
aHough_param1_aCannyHiTreshold = cv2.getTrackbarPos( "param1_HiTreshold", "DEMO.Canny.Circles" )
aHough_param2_aCentreDetectTreshold = cv2.getTrackbarPos( "param2_CentreDetect","DEMO.Canny.Circles" )
aHough_minRadius = cv2.getTrackbarPos( "minRadius", "DEMO.Canny.Circles" )
aHough_maxRadius = cv2.getTrackbarPos( "maxRadius", "DEMO.Canny.Circles" )
if ( aHough_dp != aHough_dp_PREVIOUS
or aHough_minDistance != aHough_minDistance_PREVIOUS
or aHough_param1_aCannyHiTreshold != aHough_param1_aCannyHiTreshold_PREVIOUS
or aHough_param2_aCentreDetectTreshold != aHough_param2_aCentreDetectTreshold_PREVIOUS
or aHough_minRadius != aHough_minRadius_PREVIOUS
or aHough_maxRadius != aHough_maxRadius_PREVIOUS
):
aHoughRefreshFLAG = True
aHough_dp_PREVIOUS = aHough_dp
aHough_minDistance_PREVIOUS = aHough_minDistance
aHough_param1_aCannyHiTreshold_PREVIOUS = aHough_param1_aCannyHiTreshold
aHough_param2_aCentreDetectTreshold_PREVIOUS = aHough_param2_aCentreDetectTreshold
aHough_minRadius_PREVIOUS = aHough_minRadius
aHough_maxRadius_PREVIOUS = aHough_maxRadius
else:
aHoughRefreshFLAG = False
if ( aCannyRefreshFLAG ):
edges = cv2.Canny( demo, aCanny_LoTreshold,
aCanny_HiTreshold
)
cv2.imshow( "DEMO.Canny", edges )
pass
if ( aCannyRefreshFLAG or aHoughRefreshFLAG ):
circles = cv2.HoughCircles( edges, cv2.cv.CV_HOUGH_GRADIENT,
aHough_dp,
aHough_minDistance,
param1 = aHough_param1_aCannyHiTreshold,
param2 = aHough_param2_aCentreDetectTreshold,
minRadius = aHough_minRadius,
maxRadius = aHough_maxRadius
)
demoWithCircles = cv2.cvtColor( demo, cv2.COLOR_BGR2RGB )
demoWithCircles = cv2.cvtColor( demoWithCircles, cv2.COLOR_RGB2BGR )
for aCircle in circles[0]:
cv2.circle( demoWithCircles, ( int( aCircle[0] ), int( aCircle[1] ) ),
aCircle[2],
(0,255,0),
1
)
pass
pass
cv2.imshow( "DEMO.Canny.Circles", demoWithCircles )
pass
aKeyPRESSED = cv2.waitKey(1) & 0xFF
pass
cv2.destroyWindow( "DEMO.IN" )
cv2.destroyWindow( "DEMO.Canny" )
cv2.destroyWindow( "DEMO.Canny.Circles" )
pass
def main():
GUI_openCV_circles()
return 0
if __name__ == '__main__':
main()
 http://i.imgur.com/iGyr7TG.jpg
提前致谢。
http://i.imgur.com/iGyr7TG.jpg
提前致谢。{kind=link}
dp– 累加器分辨率与图像分辨率的倒数。例如,如果dp=1,累加器的分辨率与输入图像相同。如果dp=2,累加器的宽度和高度减半。 - user3666197