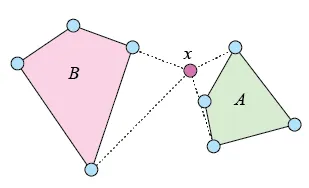
我们有一组标记点,它们的凸包不重叠。凸包之间有一些空白区域。
给定一个未标记的点且不在我们的数据中,我们想要近似确定它位于哪个凸包内。
为了加快计算速度,我们希望减少凸包上的边数(从而略微扩展凸包,但不要太多)。
有哪些算法可以使用?
更新:理想情况下,我们希望在不与给定附近的多边形相交的约束条件下进行扩展。(这一约束的动机是我有几个不相交的凸包,想要减少它们所有的边数,同时仍保持它们不相交。但请将其作为插入说明处理,因为我不想进行联合修改。我很乐意在保持其他凸包不变的情况下修改一个凸包。我很高兴将这个简单的情况改进为迭代式联合修改。)
给定一个未标记的点且不在我们的数据中,我们想要近似确定它位于哪个凸包内。
为了加快计算速度,我们希望减少凸包上的边数(从而略微扩展凸包,但不要太多)。
有哪些算法可以使用?
更新:理想情况下,我们希望在不与给定附近的多边形相交的约束条件下进行扩展。(这一约束的动机是我有几个不相交的凸包,想要减少它们所有的边数,同时仍保持它们不相交。但请将其作为插入说明处理,因为我不想进行联合修改。我很乐意在保持其他凸包不变的情况下修改一个凸包。我很高兴将这个简单的情况改进为迭代式联合修改。)