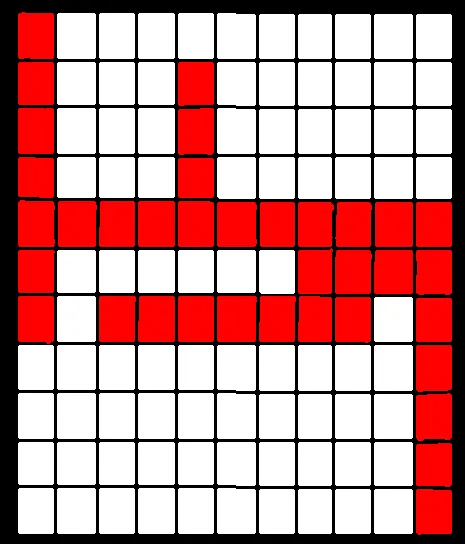
我是一名全新的图像处理者,遇到了一个问题。我有这张图片:
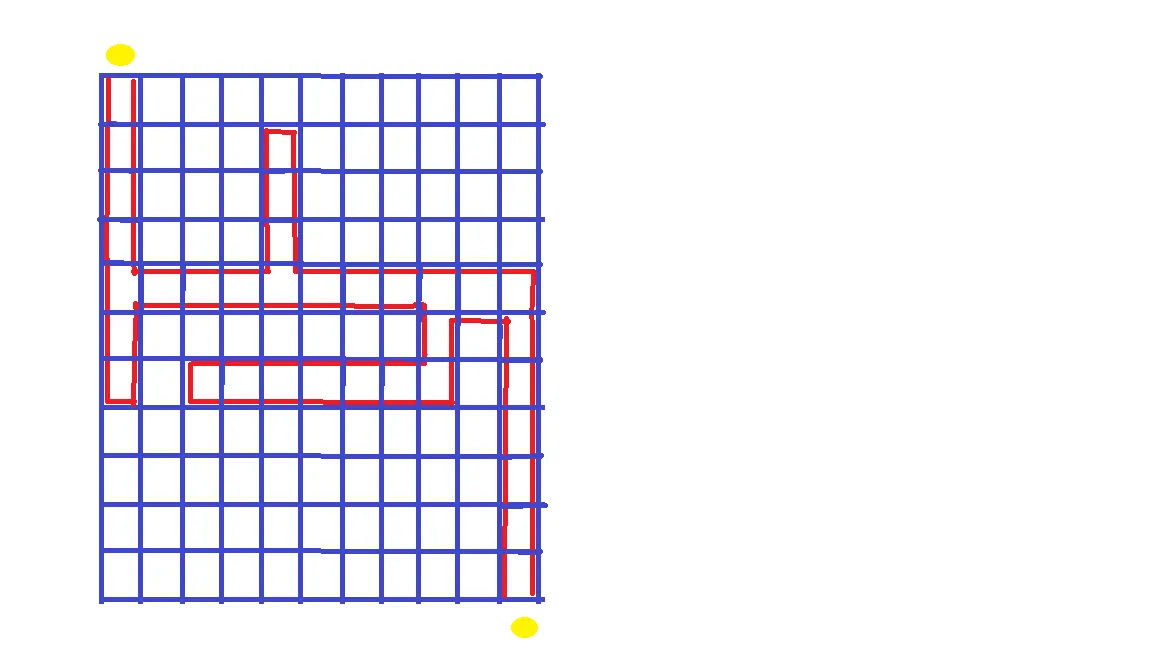
因此,这将是:
10000000000
10001000000
10001000000
10001000000
11111111111
10000000101
10111111101
etc...
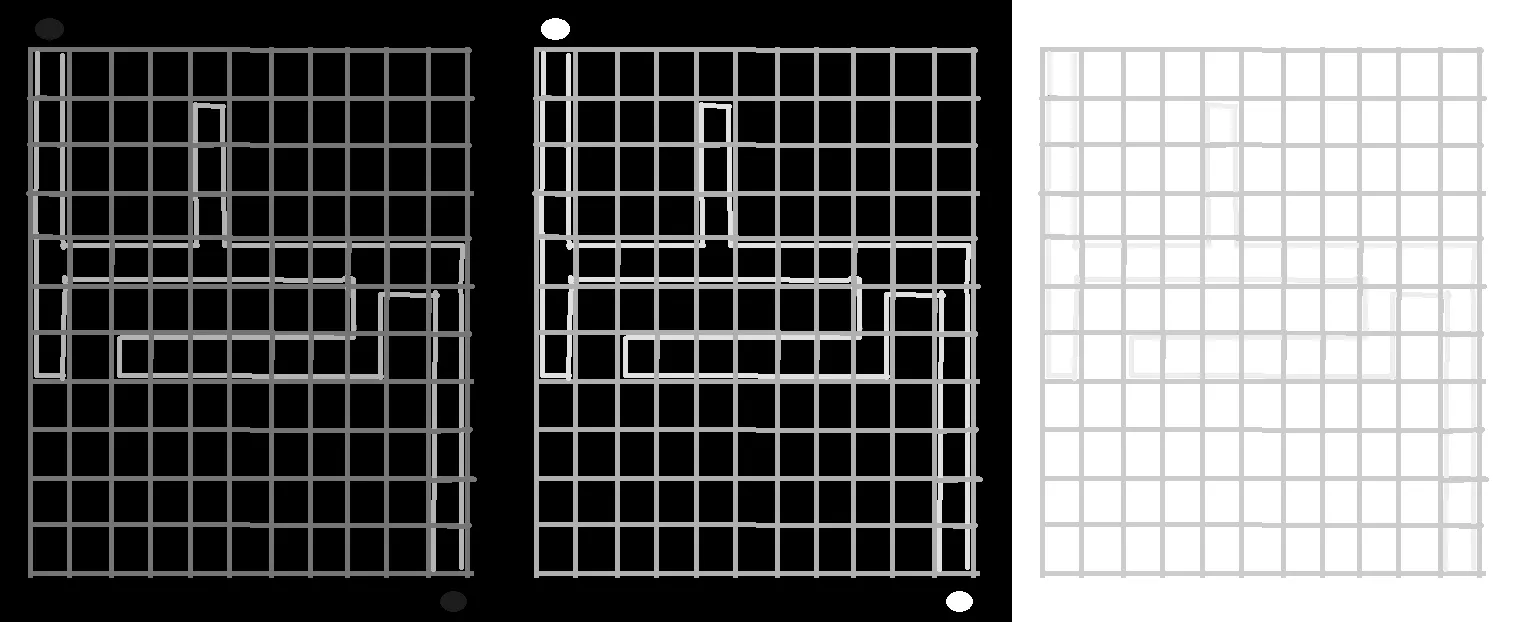
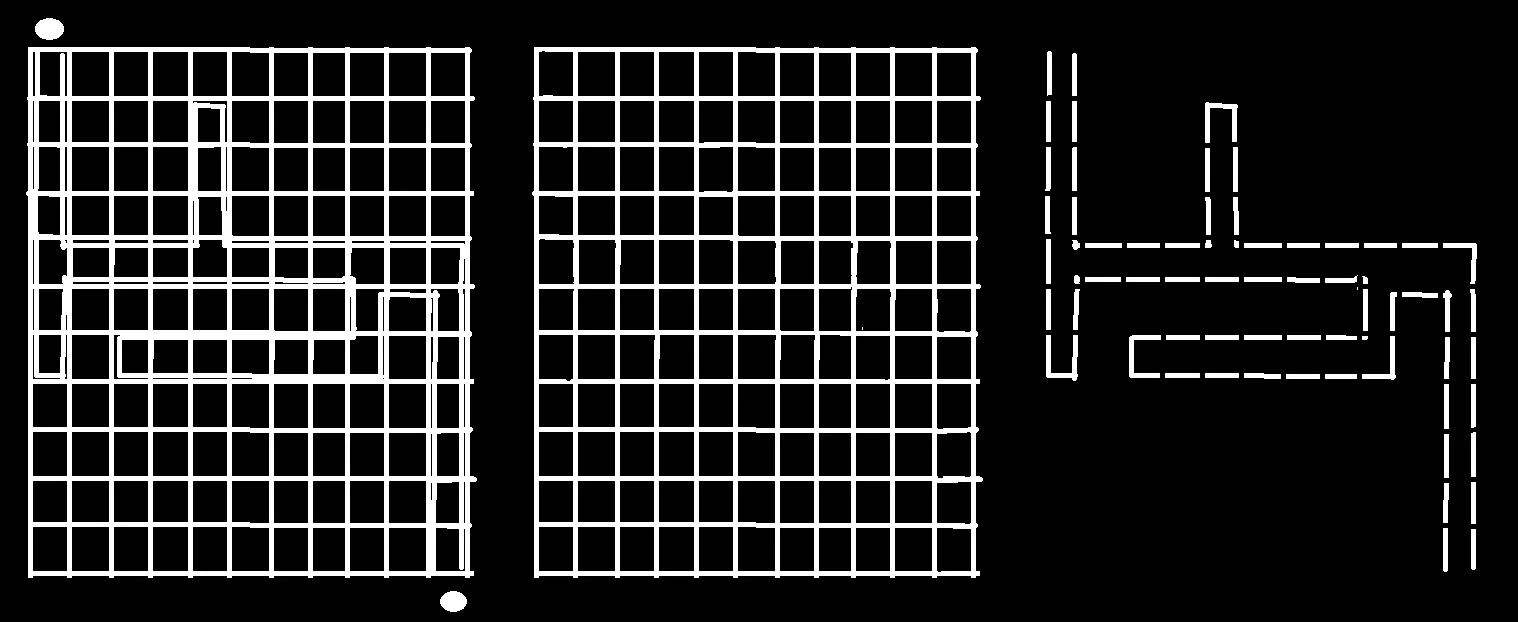
我有一段代码,它可以提取轮廓并使用approxPolyDP来确定4个角边缘的(x,y)坐标。
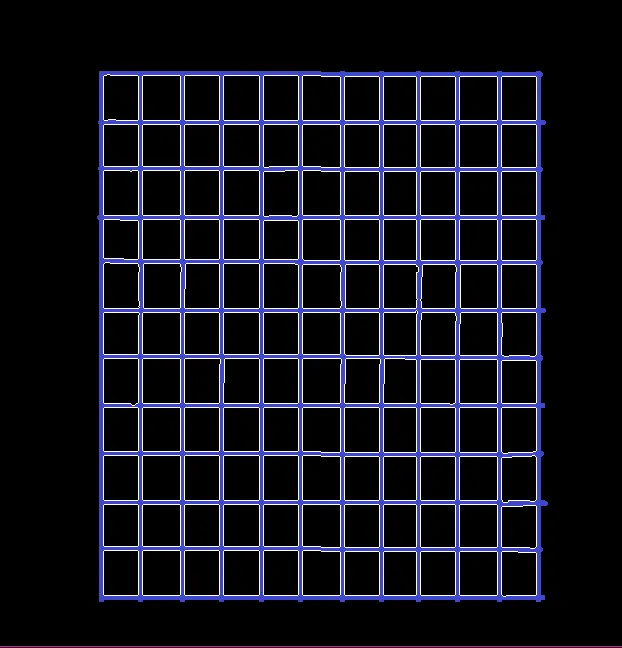
这是我的一些代码:希望有人能帮忙!
def extract_cells(grid):
#convert to gray
image_gray = cv2.cvtColor(grid, cv2.COLOR_BGR2GRAY)
#creates a binary image from the gray scale image to use as input for findContours()
#thresh = cv2.adaptiveThreshold(image_gray,255,cv2.ADAPTIVE_THRESH_MEAN_C,cv2.THRESH_BINARY_INV,11,15)
#Find countors
tempimg, contours, hierarchy = cv2.findContours(image_gray, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
#draw all countours
count = 0
max_size = 0
matrix = []
new_contours = []
grid_contour = 0
grid_contour_row = None
grid_contour_column = None
for each in enumerate(contours):
#used to find the midpoint of each cell
M = cv2.moments(contours[count])
row = int(M['m10']/M['m00'])
column = int(M['m01']/M['m00'])
#find biggest box (this is the grid itself, so needs to be removed since it is not a cell)
size = cv2.contourArea(contours[count])
if (size > max_size):
new_contours.append(contours[grid_contour])
#put a marker in each cell for testing
#if (grid_contour_row != None and grid_contour_column != None):
#cv2.putText(grid, "0", (grid_contour_row, grid_contour_column), cv2.FONT_HERSHEY_SIMPLEX, 1, (255,255,255))
grid_contour = count
grid_contour_row = row
grid_contour_column = column
else:
new_contours.append(contours[count])
#put a marker in each cell for testing
#cv2.putText(grid, "0", (row, column), cv2.FONT_HERSHEY_SIMPLEX, 1, (255,255,255))
#matrix = create_matrix(matrix,count)
count += 1
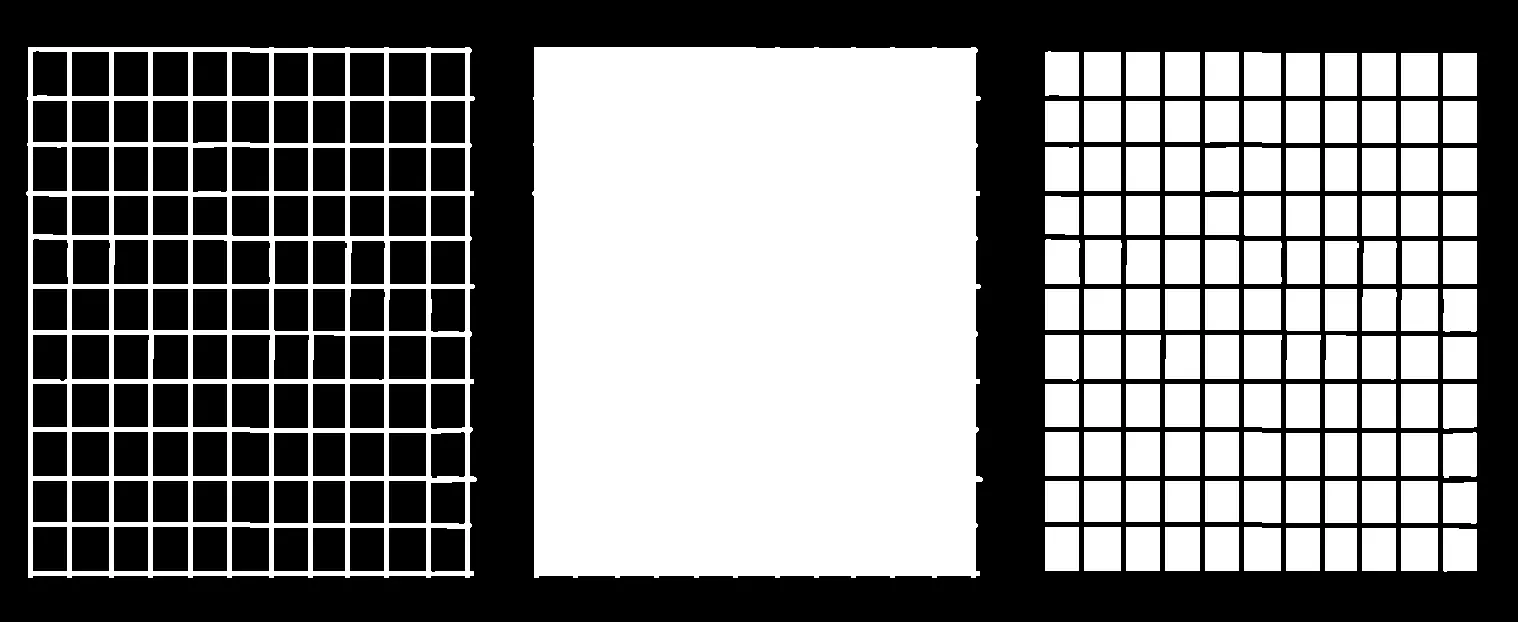
#draw white lines showing contours
cv2.drawContours(grid, new_contours, -1, (255,255,255))
#approx contains x,y coordinates for the 4 corners of the cell
approx = cv2.approxPolyDP(contours[0],0.01*cv2.arcLength(contours[0],True),True)
cv2.imshow("test", grid)
cv2.waitKey(0)
return new_contours, approx
def identify_colors(image, *colors):
colorlist = []
#Add RGB values for each color specified when the function was called
#to the list colorlist
if "blue" in colors:
colorlist.append(([115,0,0], [255,100,100]))
if "white" in colors:
colorlist.append(([215, 215, 215], [255, 255, 255]))
if "red" in colors:
colorlist.append(([0,0,100], [100,100,255]))
if "green" in colors:
colorlist.append(([0,115,0], [100,255,100]))
#loop over the colorlist
for (lower, upper) in colorlist:
# create NumPy arrays from the colorlist
lower = np.array(lower, dtype = "uint8")
upper = np.array(upper, dtype = "uint8")
#econverts image to b/w with white being anything in the BGR value range
mask = cv2.inRange(image, lower, upper)
#converts that specified range back to its orginal color
output = cv2.bitwise_and(image, image, mask = mask)
#show the photos side by side
#cv2.imshow("images", np.hstack([image, output]))
#cv2.waitKey(0)
return output