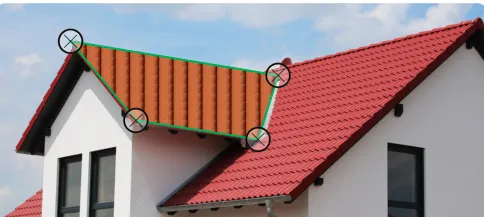
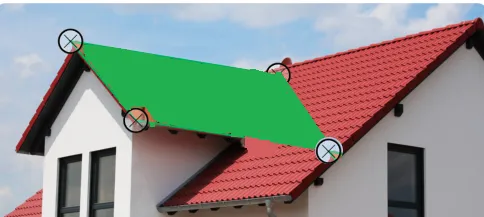
我正在撰写一份详细的解决方案,但我想确保我正在解决正确的问题。计划是创建一个变换,正确地扭曲“屋瓦”图案(或任何类似的图案),以便在映射到右侧图像中的四边形时正确透视变形?即,四边形ABCE被映射到四边形A'B'C'E'?
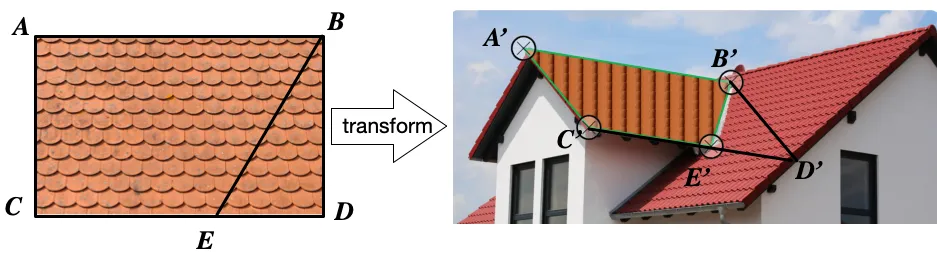
第一步是计算一个单应矩阵,将四边形ABCD映射到A'B'C'D'。OpenCV提供了相关方法, 但我们自己来计算数学问题。我们要寻找一个3x3的矩阵H,将点A,B,C,D映射到点A',B',C',D',如下所示(实际上我们会反过来做):
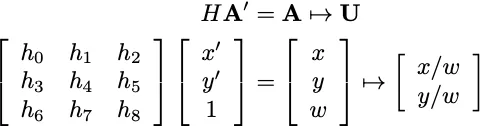
使用三维齐次向量(x,y,w)可以让我们在三维空间中工作,并且除以w提供了必要的透视缩短效果(简而言之)。
事实证明,任何H的比例倍数都有效,这意味着它只有8个自由度(而不是完整的3 * 3 = 9)。这意味着我们希望H
A'是
A的比例倍数,因此它们的叉积为零:
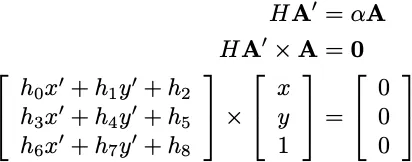
如果我们进行叉积运算,我们可以将最后一个方程重写为:
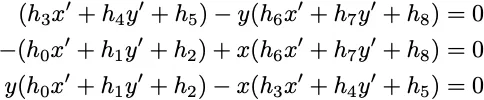
上面的最后一个方程实际上是前两个方程的线性组合(将第一个方程乘以x,将第二个方程乘以y,相加即可得到第三个方程)。由于第三个方程是线性相关的,我们将其舍去,只使用前两个方程。在否定第二个方程、交换它们并将它们转换为矩阵形式之后,我们得到
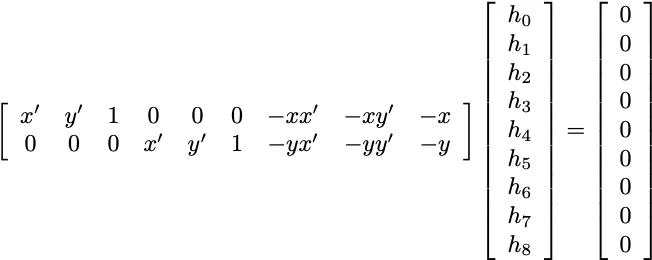
因此,一个点对应的
A' -
A会产生两个方程。如果我们有n个点对应,我们将得到2n个方程:
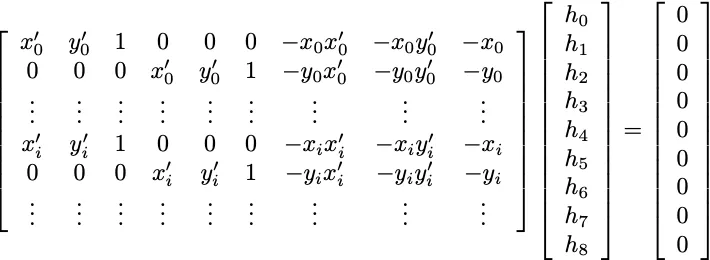
我们需要 n >= 4,才能至少得到8个方程以获得一个正确的解;也就是说,我们至少需要4个(非共线)点。
因此,我们有一个齐次方程组,我们使用
奇异值分解来解决它:
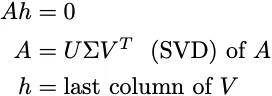
显然,微不足道的解决方案 h = 0 是有效的,但并不是很有用。将 h 设置为 V 的最后一列会导致系统的最小二乘误差解,其中 h 的长度为单位长度。
让我们为您的特定示例计算 H。假设要转换的源图像为 WxH = 500x300,因此 A = (0,0),B = (W,0),C = (0,H) 和 D = (W,H)。目标图像为 484x217,我将屋顶的角落定位为 A' = (70.7, 41.3),B' = (278.8, 76.3),C' = (136.4, 121,2) 和 D' = (345.1, 153,2)。我将使用
Eigen 进行计算。因此,我将我的源点和目标点加载到矩阵中:
#include <Eigen/Dense>
...
constexpr double W = 500;
constexpr double H = 300;
constexpr size_t N = 4;
Eigen::Matrix<double,2,N> SRC;
SRC <<
0, W, 0, W,
0, 0, H, H;
Eigen::Matrix<double,2,N> DST;
DST <<
70.7, 278.8, 136.4, 345.1,
41.3, 76.3, 121.2, 153.2;
我按上述方式构造了一个8x9矩阵A。
Eigen::Matrix<double,2*N,9> A;
A.setZero();
for (size_t i = 0; i < N; i++) {
const double x_ = DST(0,i), y_ = DST(1,i);
const double x = SRC(0,i), y = SRC(1,i);
A(2*i,0) = A(2*i+1,3) = x_;
A(2*i,1) = A(2*i+1,4) = y_;
A(2*i,2) = A(2*i+1,5) = 1;
A(2*i,6) = -x*x_;
A(2*i,7) = -x*y_;
A(2*i,8) = -x;
A(2*i+1,6) = -y*x_;
A(2*i+1,7) = -y*y_;
A(2*i+1,8) = -y;
}
我接着计算奇异值分解(SVD),从V的最后一列中提取出解,并将结果存储在一个3x3矩阵中:
Eigen::JacobiSVD<Eigen::Matrix<double,2*N,9>> svd(A, Eigen::ComputeFullV);
Eigen::Matrix<double,9,1> h = svd.matrixV().col(8);
Eigen::Matrix3d Homography;
Homography <<
h(0), h(1), h(2),
h(3), h(4), h(5),
h(6), h(7), h(8);
产生所需的3x3矩阵H:
-0.016329 0.013427 0.599927
0.004571 -0.0271779 0.799277
1.78122e-06 -2.83812e-06 -0.00613631
我们可以使用OpenCV查看一个扭曲图像的样例。我加载我的源纹理和单应矩阵H,并使用OpenCV的
warpPerspective函数。
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc.hpp>
int main() {
cv::Mat sourceImage = imread("texture.png", cv::IMREAD_COLOR);
cv::Matx33d H(-0.016329, 0.013427, 0.599927,
0.004571, -0.0271779, 0.799277,
1.78122e-06, -2.83812e-06, -0.00613631);
cv::Mat destImage;
cv::warpPerspective(sourceImage, destImage, H, cv::Size(487,217),
cv::INTER_LINEAR | cv::WARP_INVERSE_MAP);
cv::imwrite("warped.png", destImage);
return 0;
}
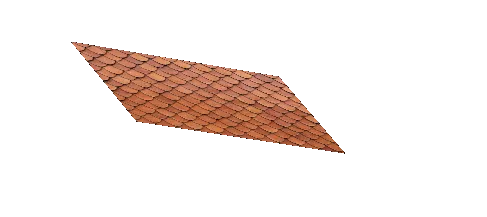
结果看起来是合理的: