我正在尝试创建一个快速的2D点在多边形内部算法,用于命中测试(例如Polygon.contains(p:Point))。欢迎提供有效技巧建议。
如何确定一个二维点是否在多边形内?(涉及IT技术)
605
- Scott Evernden
5
42个回答
2
.Net端口:
static void Main(string[] args)
{
Console.Write("Hola");
List<double> vertx = new List<double>();
List<double> verty = new List<double>();
int i, j, c = 0;
vertx.Add(1);
vertx.Add(2);
vertx.Add(1);
vertx.Add(4);
vertx.Add(4);
vertx.Add(1);
verty.Add(1);
verty.Add(2);
verty.Add(4);
verty.Add(4);
verty.Add(1);
verty.Add(1);
int nvert = 6; //Vértices del poligono
double testx = 2;
double testy = 5;
for (i = 0, j = nvert - 1; i < nvert; j = i++)
{
if (((verty[i] > testy) != (verty[j] > testy)) &&
(testx < (vertx[j] - vertx[i]) * (testy - verty[i]) / (verty[j] - verty[i]) + vertx[i]))
c = 1;
}
}
- Aladar
2
惊讶的是之前没有人提到,但对于需要数据库的实用主义者来说:MongoDB在地理查询方面有很好的支持,包括这个。
你要找的是:
db.neighborhoods.findOne({ geometry: { $geoIntersects: { $geometry: { type: "Point", coordinates: [ "longitude", "latitude" ] } } } })
“Neighborhoods”是以标准GeoJson格式存储一个或多个多边形的集合。如果查询返回null,则不相交,否则就相交。
详细的文档在这里: https://docs.mongodb.com/manual/tutorial/geospatial-tutorial/ 在330个不规则多边形网格中分类超过6,000个点的性能,甚至没有任何优化并且包括更新其各自多边形所需的时间,少于一分钟。
你要找的是:
db.neighborhoods.findOne({ geometry: { $geoIntersects: { $geometry: { type: "Point", coordinates: [ "longitude", "latitude" ] } } } })
“Neighborhoods”是以标准GeoJson格式存储一个或多个多边形的集合。如果查询返回null,则不相交,否则就相交。
详细的文档在这里: https://docs.mongodb.com/manual/tutorial/geospatial-tutorial/ 在330个不规则多边形网格中分类超过6,000个点的性能,甚至没有任何优化并且包括更新其各自多边形所需的时间,少于一分钟。
- Santiago M. Quintero
1
如果您正在使用Google Map SDK并想要检查一个点是否在多边形内,可以尝试使用
这是参考资料: https://developers.google.com/maps/documentation/ios-sdk/reference/group___geometry_utils#gaba958d3776d49213404af249419d0ffd
GMSGeometryContainsLocation。它效果很好!以下是它的工作原理:if GMSGeometryContainsLocation(point, polygon, true) {
print("Inside this polygon.")
} else {
print("outside this polygon")
}
这是参考资料: https://developers.google.com/maps/documentation/ios-sdk/reference/group___geometry_utils#gaba958d3776d49213404af249419d0ffd
- Yuan Fu
1
这是一个不使用射线法的C语言多边形包含点测试。它可以处理重叠区域(自相交),请参见
注意:这是一种不太优化的方法,因为它包含了很多对
use_holes参数。/* math lib (defined below) */
static float dot_v2v2(const float a[2], const float b[2]);
static float angle_signed_v2v2(const float v1[2], const float v2[2]);
static void copy_v2_v2(float r[2], const float a[2]);
/* intersection function */
bool isect_point_poly_v2(const float pt[2], const float verts[][2], const unsigned int nr,
const bool use_holes)
{
/* we do the angle rule, define that all added angles should be about zero or (2 * PI) */
float angletot = 0.0;
float fp1[2], fp2[2];
unsigned int i;
const float *p1, *p2;
p1 = verts[nr - 1];
/* first vector */
fp1[0] = p1[0] - pt[0];
fp1[1] = p1[1] - pt[1];
for (i = 0; i < nr; i++) {
p2 = verts[i];
/* second vector */
fp2[0] = p2[0] - pt[0];
fp2[1] = p2[1] - pt[1];
/* dot and angle and cross */
angletot += angle_signed_v2v2(fp1, fp2);
/* circulate */
copy_v2_v2(fp1, fp2);
p1 = p2;
}
angletot = fabsf(angletot);
if (use_holes) {
const float nested = floorf((angletot / (float)(M_PI * 2.0)) + 0.00001f);
angletot -= nested * (float)(M_PI * 2.0);
return (angletot > 4.0f) != ((int)nested % 2);
}
else {
return (angletot > 4.0f);
}
}
/* math lib */
static float dot_v2v2(const float a[2], const float b[2])
{
return a[0] * b[0] + a[1] * b[1];
}
static float angle_signed_v2v2(const float v1[2], const float v2[2])
{
const float perp_dot = (v1[1] * v2[0]) - (v1[0] * v2[1]);
return atan2f(perp_dot, dot_v2v2(v1, v2));
}
static void copy_v2_v2(float r[2], const float a[2])
{
r[0] = a[0];
r[1] = a[1];
}
注意:这是一种不太优化的方法,因为它包含了很多对
atan2f 的调用,但对于阅读此线程的开发人员可能会有兴趣(在我的测试中,使用该方法比使用线段相交法慢约23倍)。- ideasman42
1
这是另一种基于NumPy的实现,我认为它是目前所有答案中最简洁的一个。
例如,假设我们有一个带空洞的多边形,看起来像这样:
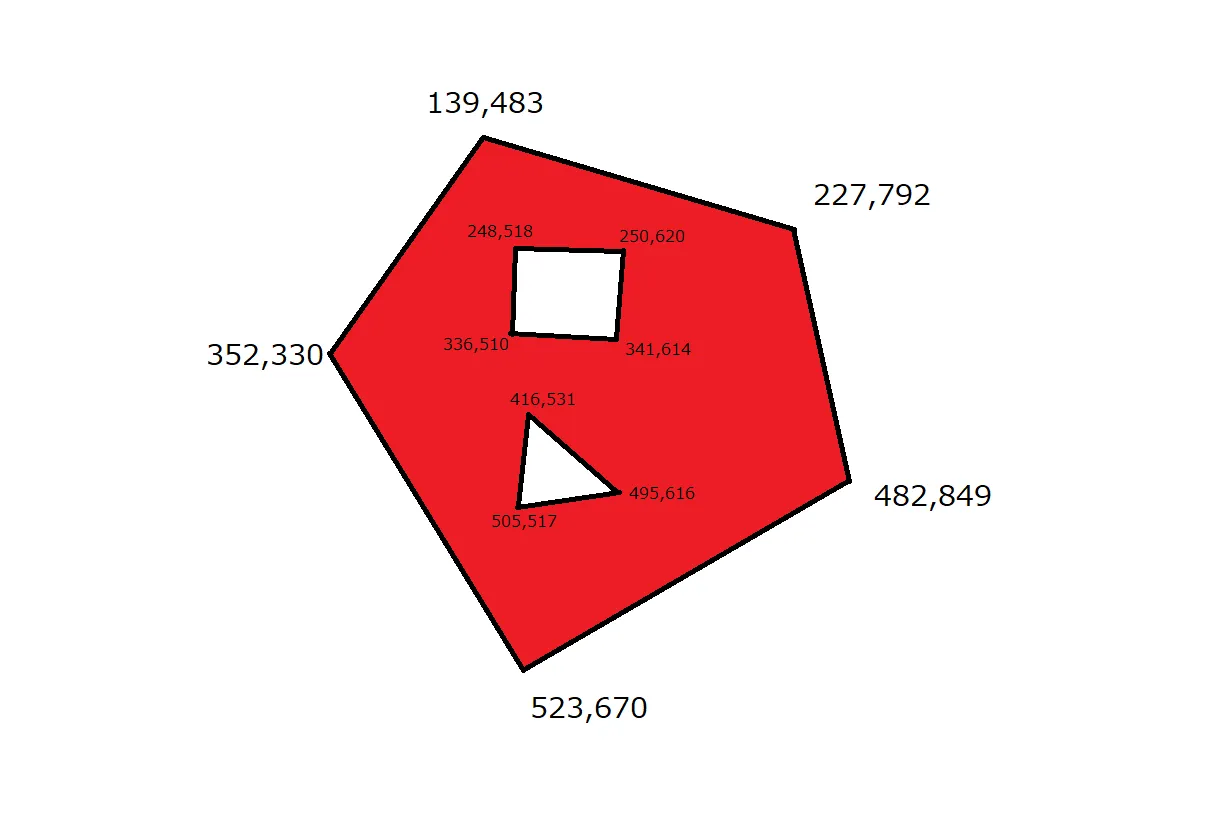
大多边形顶点的二维坐标为
[[139, 483], [227, 792], [482, 849], [523, 670], [352, 330]]
正方形中空的顶点坐标为
[[248, 518], [336, 510], [341, 614], [250, 620]]
三角形中空的顶点坐标为。
[[416, 531], [505, 517], [495, 616]]
我們想測試兩個點
[296, 557] 和 [422, 730] 是否在紅色區域內(不包括邊緣)。如果我們定位這兩個點,它會像這樣:
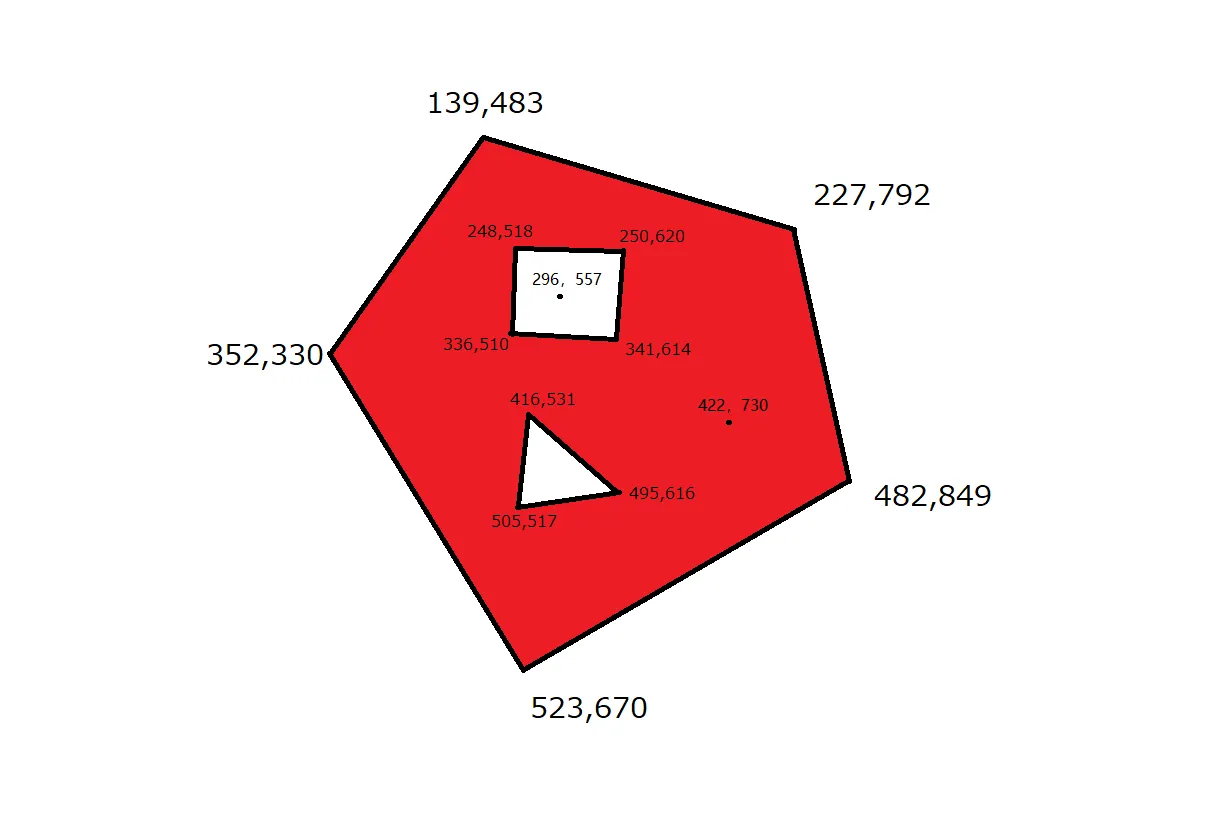 顯然,
顯然,[296, 557] 不在紅色區域內,而 [422, 730] 在其中。我的解決方案基於 winding number algorithm。以下是我使用僅
numpy 的 4 行 Python 代碼:def detect(points, *polygons):
import numpy as np
endpoint1 = np.r_[tuple(np.roll(p, 1, 0) for p in polygons)][:, None] - points
endpoint2 = np.r_[polygons][:, None] - points
p1, p2 = np.cross(endpoint1, endpoint2), np.einsum('...i,...i', endpoint1, endpoint2)
return ~((p1.sum(0) < 0) ^ (abs(np.arctan2(p1, p2).sum(0)) > np.pi) | ((p1 == 0) & (p2 <= 0)).any(0))
测试实现:
points = [[296, 557], [422, 730]]
polygon1 = [[139, 483], [227, 792], [482, 849], [523, 670], [352, 330]]
polygon2 = [[248, 518], [336, 510], [341, 614], [250, 620]]
polygon3 = [[416, 531], [505, 517], [495, 616]]
print(detect(points, polygon1, polygon2, polygon3))
输出:
[False True]
- Shaun Han
1
这是一个较不优化的C代码版本,此处提供了源代码,此页面提供了来源。
我的C ++版本使用
我的C ++版本使用
std :: vector<std :: pair <double,double>>和两个双精度浮点数作为x和y。逻辑应该与原始的C代码完全相同,但我发现我的代码更易于阅读。我无法保证性能。bool point_in_poly(std::vector<std::pair<double, double>>& verts, double point_x, double point_y)
{
bool in_poly = false;
auto num_verts = verts.size();
for (int i = 0, j = num_verts - 1; i < num_verts; j = i++) {
double x1 = verts[i].first;
double y1 = verts[i].second;
double x2 = verts[j].first;
double y2 = verts[j].second;
if (((y1 > point_y) != (y2 > point_y)) &&
(point_x < (x2 - x1) * (point_y - y1) / (y2 - y1) + x1))
in_poly = !in_poly;
}
return in_poly;
}
原始的C代码是
int pnpoly(int nvert, float *vertx, float *verty, float testx, float testy)
{
int i, j, c = 0;
for (i = 0, j = nvert-1; i < nvert; j = i++) {
if ( ((verty[i]>testy) != (verty[j]>testy)) &&
(testx < (vertx[j]-vertx[i]) * (testy-verty[i]) / (verty[j]-verty[i]) + vertx[i]) )
c = !c;
}
return c;
}
- TankorSmash
0
如果你正在寻找一个JavaScript库,那么有一个JavaScript Google Maps V3扩展可以用于Polygon类,以便检测一个点是否在其中。
var polygon = new google.maps.Polygon([], "#000000", 1, 1, "#336699", 0.3);
var isWithinPolygon = polygon.containsLatLng(40, -90);
- Shanaka Rathnayaka
0
以下是 nirg 提供的 Scala 版本解决方案(假设边界矩形预检已单独完成):
def inside(p: Point, polygon: Array[Point], bounds: Bounds): Boolean = {
val length = polygon.length
@tailrec
def oddIntersections(i: Int, j: Int, tracker: Boolean): Boolean = {
if (i == length)
tracker
else {
val intersects = (polygon(i).y > p.y) != (polygon(j).y > p.y) && p.x < (polygon(j).x - polygon(i).x) * (p.y - polygon(i).y) / (polygon(j).y - polygon(i).y) + polygon(i).x
oddIntersections(i + 1, i, if (intersects) !tracker else tracker)
}
}
oddIntersections(0, length - 1, tracker = false)
}
- Michael-7
0
这是@girg答案的golang版本(受@m-katz的C#代码启发)
func isPointInPolygon(polygon []point, testp point) bool {
minX := polygon[0].X
maxX := polygon[0].X
minY := polygon[0].Y
maxY := polygon[0].Y
for _, p := range polygon {
minX = min(p.X, minX)
maxX = max(p.X, maxX)
minY = min(p.Y, minY)
maxY = max(p.Y, maxY)
}
if testp.X < minX || testp.X > maxX || testp.Y < minY || testp.Y > maxY {
return false
}
inside := false
j := len(polygon) - 1
for i := 0; i < len(polygon); i++ {
if (polygon[i].Y > testp.Y) != (polygon[j].Y > testp.Y) && testp.X < (polygon[j].X-polygon[i].X)*(testp.Y-polygon[i].Y)/(polygon[j].Y-polygon[i].Y)+polygon[i].X {
inside = !inside
}
j = i
}
return inside
}
- SamTech
0
就像David Segonds' answer所建议的那样,我使用了一种角度求和方法,该方法源自我的凹多边形绘制算法。 它依赖于将围绕点的子三角形的近似角度相加以获得权重。 权重约为1.0表示该点在三角形内部,约为0.0表示在外部,约为-1.0的权重是发生在多边形内但顺序相反的情况(例如菱形的两半之一),如果恰好位于边缘,则为NAN。它之所以不慢,是因为角度根本不需要精确估计。通过将孔视为单独的多边形并减去权重来处理它们。
typedef struct { double x, y; } xy_t;
xy_t sub_xy(xy_t a, xy_t b)
{
a.x -= b.x;
a.y -= b.y;
return a;
}
double calc_sharp_subtriangle_pixel_weight(xy_t p0, xy_t p1)
{
xy_t rot, r0, r1;
double weight;
// Rotate points (unnormalised)
rot = sub_xy(p1, p0);
r0.x = rot.x*p0.y - rot.y*p0.x;
r0.y = rot.x*p0.x + rot.y*p0.y;
r1.y = rot.x*p1.x + rot.y*p1.y;
// Calc weight
weight = subtriangle_angle_approx(r1.y, r0.x) - subtriangle_angle_approx(r0.y, r0.x);
return weight;
}
double calc_sharp_polygon_pixel_weight(xy_t p, xy_t *corner, int corner_count)
{
int i;
xy_t p0, p1;
double weight = 0.;
p0 = sub_xy(corner[corner_count-1], p);
for (i=0; i < corner_count; i++)
{
// Transform corner coordinates
p1 = sub_xy(corner[i], p);
// Calculate weight for each subtriangle
weight += calc_sharp_subtriangle_pixel_weight(p0, p1);
p0 = p1;
}
return weight;
}
因此,对于多边形的每个部分,将形成一个与待评估点相关的子三角形,然后将旋转每个子三角形以评估其近似角度并加入权重。
可以用 atan2(y, x) / (2.*pi) 替换对 subtriangle_angle_approx(y, x) 的调用,但是粗略的近似就足够准确了:
double subtriangle_angle_approx(double y, double x)
{
double angle, d;
int obtuse;
if (x == 0.)
return NAN;
obtuse = fabs(y) > fabs(x);
if (obtuse)
swap_double(&y, &x);
// Core of the approximation, a very loosely approximate atan(y/x) / (2.*pi) over ]-1 , 1[
d = y / x;
angle = 0.13185 * d;
if (obtuse)
angle = sign(d)*0.25 - angle;
return angle;
}
- Michel Rouzic
网页内容由stack overflow 提供, 点击上面的可以查看英文原文,
原文链接
原文链接
point.within(polygon),它会返回一个布尔值,表示点是否在多边形内部。 - J Agustin Barrachina