我正在尝试创建一个快速的2D点在多边形内部算法,用于命中测试(例如Polygon.contains(p:Point))。欢迎提供有效技巧建议。
如何确定一个二维点是否在多边形内?(涉及IT技术)
605
- Scott Evernden
5
42个回答
10
我曾在Michael Stonebraker名下担任研究员时,对此进行了一些工作 - 你知道的,他是Ingres、PostgreSQL等项目的创始人。
我们意识到最快的方法是先做一个边界框,因为它非常快。如果在边框之外,就在外面。否则,你需要做更难的工作...
如果你想要一个很棒的算法,可以查看开源项目PostgreSQL的源代码来处理地理信息...
我想指出的是,我们从未得到过关于左右手问题(也可表达为“内部”与“外部”问题)的任何见解...
更新
BKB的链接提供了许多合理的算法。我正在处理地球科学问题,因此需要一种在纬度/经度下工作的解决方案,并且它有一个特殊的问题 - 小区域内部还是大区域内部?答案是顶点的“方向”很重要 - 它可以是左手或右手,以此方式您可以将任何给定多边形的任一区域指示为“内部”。因此,我的工作使用了该页面上枚举的第三种解决方案。
此外,我的工作使用了单独的函数进行“在线”测试。
...由于有人问:当顶点数超过某个数字时,我们发现边界框测试效果最好 - 如果需要,在进行更长时间的测试之前进行非常快速的测试...边界框通过简单地取最大x,最小x,最大y和最小y并将它们放在一起来创建一个框的四个点...
对于那些跟随的人的另一个提示:我们所有更复杂和“光暗”计算都在平面上的正点格网空间中完成,然后重新投影回“真实”的经度/纬度,从而避免了可能出现的错误,如越过经线180时的包裹错误以及处理极地区域时的错误。效果非常好!
- Richard T
3
如果我没有边界框怎么办? :) - Scott Evernden
8您可以轻松创建一个边界框 - 它只是使用最大和最小的 x 和最大和最小的 y 的四个点。更多内容即将呈现。 - Richard T
避免可能的错误,当一个线穿过经度180度时和处理极地区域时,会出现包裹错误。你能否详细描述一下这个问题?我可以想出如何将所有东西“向上”移动以避免我的多边形穿越0经度,但我不清楚如何处理包含两极之一的多边形... - tiritea
6
Java版本:
public class Geocode {
private float latitude;
private float longitude;
public Geocode() {
}
public Geocode(float latitude, float longitude) {
this.latitude = latitude;
this.longitude = longitude;
}
public float getLatitude() {
return latitude;
}
public void setLatitude(float latitude) {
this.latitude = latitude;
}
public float getLongitude() {
return longitude;
}
public void setLongitude(float longitude) {
this.longitude = longitude;
}
}
public class GeoPolygon {
private ArrayList<Geocode> points;
public GeoPolygon() {
this.points = new ArrayList<Geocode>();
}
public GeoPolygon(ArrayList<Geocode> points) {
this.points = points;
}
public GeoPolygon add(Geocode geo) {
points.add(geo);
return this;
}
public boolean inside(Geocode geo) {
int i, j;
boolean c = false;
for (i = 0, j = points.size() - 1; i < points.size(); j = i++) {
if (((points.get(i).getLongitude() > geo.getLongitude()) != (points.get(j).getLongitude() > geo.getLongitude())) &&
(geo.getLatitude() < (points.get(j).getLatitude() - points.get(i).getLatitude()) * (geo.getLongitude() - points.get(i).getLongitude()) / (points.get(j).getLongitude() - points.get(i).getLongitude()) + points.get(i).getLatitude()))
c = !c;
}
return c;
}
}
- YongJiang Zhang
6
一个简单的解决方案是将多边形分割成三角形,并像这里所解释的那样对其进行命中测试。
如果您的多边形是凸多边形,则可能有更好的方法。将多边形视为无限线的集合。每条线将空间分为两个部分。对于每个点来说,很容易判断它是在线的一侧还是另一侧。如果一个点在所有线的同一侧,则它在多边形内部。
- Shy
4
非常快速,并且可以应用于更一般的形状。大约在1990年左右,我们有了“曲面”,其中一些边缘是圆弧。通过将这些边缘分析为圆形楔形和一对三角形将楔形连接到原点(多边形重心),命中测试变得快速而容易。 - DarenW
2你有这些曲线图的参考资料吗? - shoosh
我也想为曲线画引用。 - Joel in Gö
你忽略了凸多边形的一个重要解决方案:通过将点与对角线进行比较,可以将顶点数量减半。并且重复此过程,您可以在Log(N)操作中将其缩小到单个三角形,而不是N。 - user1196549
6
David Segond的答案基本上是标准通用答案,Richard T的答案是最常见的优化方法,但还有其他一些。其他强大的优化方法基于不太通用的解决方案。例如,如果您要使用许多点检查同一个多边形,则将多边形三角化可以极大地加快速度,因为存在许多非常快速的TIN搜索算法。另一个方法是,如果多边形和点在低分辨率的有限平面上,比如屏幕显示器上,您可以将多边形以给定颜色绘制到内存映射的显示缓冲区中,并检查给定像素的颜色是否在多边形内。
像许多优化一样,这些都是基于特定而不是通用情况的,并且根据摊销时间而不是单个使用效益。
在这个领域工作时,我发现Joseph O'Rourke的《C语言计算几何》(ISBN 0-521-44034-3)对我很有帮助。
- smacl
4
我知道这已经是老话题了,但是这里提供了一个在Cocoa中实现的光线投射算法,如果有人感兴趣的话可以参考一下。虽然不确定这是否是最有效的方法,但它可能会帮助到某些人。
- (BOOL)shape:(NSBezierPath *)path containsPoint:(NSPoint)point
{
NSBezierPath *currentPath = [path bezierPathByFlatteningPath];
BOOL result;
float aggregateX = 0; //I use these to calculate the centroid of the shape
float aggregateY = 0;
NSPoint firstPoint[1];
[currentPath elementAtIndex:0 associatedPoints:firstPoint];
float olderX = firstPoint[0].x;
float olderY = firstPoint[0].y;
NSPoint interPoint;
int noOfIntersections = 0;
for (int n = 0; n < [currentPath elementCount]; n++) {
NSPoint points[1];
[currentPath elementAtIndex:n associatedPoints:points];
aggregateX += points[0].x;
aggregateY += points[0].y;
}
for (int n = 0; n < [currentPath elementCount]; n++) {
NSPoint points[1];
[currentPath elementAtIndex:n associatedPoints:points];
//line equations in Ax + By = C form
float _A_FOO = (aggregateY/[currentPath elementCount]) - point.y;
float _B_FOO = point.x - (aggregateX/[currentPath elementCount]);
float _C_FOO = (_A_FOO * point.x) + (_B_FOO * point.y);
float _A_BAR = olderY - points[0].y;
float _B_BAR = points[0].x - olderX;
float _C_BAR = (_A_BAR * olderX) + (_B_BAR * olderY);
float det = (_A_FOO * _B_BAR) - (_A_BAR * _B_FOO);
if (det != 0) {
//intersection points with the edges
float xIntersectionPoint = ((_B_BAR * _C_FOO) - (_B_FOO * _C_BAR)) / det;
float yIntersectionPoint = ((_A_FOO * _C_BAR) - (_A_BAR * _C_FOO)) / det;
interPoint = NSMakePoint(xIntersectionPoint, yIntersectionPoint);
if (olderX <= points[0].x) {
//doesn't matter in which direction the ray goes, so I send it right-ward.
if ((interPoint.x >= olderX && interPoint.x <= points[0].x) && (interPoint.x > point.x)) {
noOfIntersections++;
}
} else {
if ((interPoint.x >= points[0].x && interPoint.x <= olderX) && (interPoint.x > point.x)) {
noOfIntersections++;
}
}
}
olderX = points[0].x;
olderY = points[0].y;
}
if (noOfIntersections % 2 == 0) {
result = FALSE;
} else {
result = TRUE;
}
return result;
}
- diatrevolo
1
5请注意,如果您真的正在使用 Cocoa 进行操作,那么可以使用 [NSBezierPath containsPoint:] 方法。 - ThomasW
4
没有比归纳定义问题更美的了。为了完整起见,这里有一个用Prolog编写的版本,可能也可以澄清射线投射背后的思想:
基于http://www.ecse.rpi.edu/Homepages/wrf/Research/Short_Notes/pnpoly.html中的简单模拟算法的一些辅助谓词:
exor(A,B):- \+A,B;A,\+B.
in_range(Coordinate,CA,CB) :- exor((CA>Coordinate),(CB>Coordinate)).
inside(false).
inside(_,[_|[]]).
inside(X:Y, [X1:Y1,X2:Y2|R]) :- in_range(Y,Y1,Y2), X > ( ((X2-X1)*(Y-Y1))/(Y2-Y1) + X1),toggle_ray, inside(X:Y, [X2:Y2|R]); inside(X:Y, [X2:Y2|R]).
get_line(_,_,[]).
get_line([XA:YA,XB:YB],[X1:Y1,X2:Y2|R]):- [XA:YA,XB:YB]=[X1:Y1,X2:Y2]; get_line([XA:YA,XB:YB],[X2:Y2|R]).
给出两点A和B(Line(A,B))的直线方程为:
(YB-YA)
Y - YA = ------- * (X - XA)
(XB-YB)
在边界线的情况下,需要将线条的旋转方向设置为顺时针,而在孔洞的情况下则需设置为逆时针。我们要检查点(X,Y),即被测试点是否位于我们的线的左半平面(这是一种审美问题,也可以是右侧,但在这种情况下,边界线的方向也必须更改)。这是为了将光线从点向右(或向左)投影并确认与线的交点。我们选择在水平方向上投影光线(再次是一个审美问题,也可以在垂直方向上进行类似限制),因此我们有:
(XB-XA)
X < ------- * (Y - YA) + XA
(YB-YA)
现在我们需要知道点是否在线段的左侧(或右侧),而不是整个平面,因此我们需要将搜索限制在该线段上。但这很容易,因为要在线段内部,线上的一个点必须比垂直轴上的Y更高。由于这是更强的限制条件,因此需要首先检查。因此,我们只选择符合此要求的线段然后检查其位置。根据Jordan曲线定理,任何投射到多边形的射线必须与偶数条线相交。所以我们完成了,我们将向右发射光线,每次它与一条线相交时,切换它的状态。然而,在我们的实现中,我们将检查满足给定限制的解的数量,并根据此决定是否在内部。对于多边形中的每条线都必须执行此操作。
is_left_half_plane(_,[],[],_).
is_left_half_plane(X:Y,[XA:YA,XB:YB], [[X1:Y1,X2:Y2]|R], Test) :- [XA:YA, XB:YB] = [X1:Y1, X2:Y2], call(Test, X , (((XB - XA) * (Y - YA)) / (YB - YA) + XA));
is_left_half_plane(X:Y, [XA:YA, XB:YB], R, Test).
in_y_range_at_poly(Y,[XA:YA,XB:YB],Polygon) :- get_line([XA:YA,XB:YB],Polygon), in_range(Y,YA,YB).
all_in_range(Coordinate,Polygon,Lines) :- aggregate(bag(Line), in_y_range_at_poly(Coordinate,Line,Polygon), Lines).
traverses_ray(X:Y, Lines, Count) :- aggregate(bag(Line), is_left_half_plane(X:Y, Line, Lines, <), IntersectingLines), length(IntersectingLines, Count).
% This is the entry point predicate
inside_poly(X:Y,Polygon,Answer) :- all_in_range(Y,Polygon,Lines), traverses_ray(X:Y, Lines, Count), (1 is mod(Count,2)->Answer=inside;Answer=outside).
- jdavid_1385
4
这是nirg答案的Obj-C版本,并提供了用于测试点的示例方法。Nirg的答案对我很有帮助。
- (BOOL)isPointInPolygon:(NSArray *)vertices point:(CGPoint)test {
NSUInteger nvert = [vertices count];
NSInteger i, j, c = 0;
CGPoint verti, vertj;
for (i = 0, j = nvert-1; i < nvert; j = i++) {
verti = [(NSValue *)[vertices objectAtIndex:i] CGPointValue];
vertj = [(NSValue *)[vertices objectAtIndex:j] CGPointValue];
if (( (verti.y > test.y) != (vertj.y > test.y) ) &&
( test.x < ( vertj.x - verti.x ) * ( test.y - verti.y ) / ( vertj.y - verti.y ) + verti.x) )
c = !c;
}
return (c ? YES : NO);
}
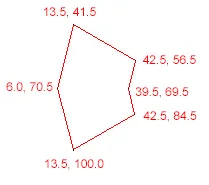
- (void)testPoint {
NSArray *polygonVertices = [NSArray arrayWithObjects:
[NSValue valueWithCGPoint:CGPointMake(13.5, 41.5)],
[NSValue valueWithCGPoint:CGPointMake(42.5, 56.5)],
[NSValue valueWithCGPoint:CGPointMake(39.5, 69.5)],
[NSValue valueWithCGPoint:CGPointMake(42.5, 84.5)],
[NSValue valueWithCGPoint:CGPointMake(13.5, 100.0)],
[NSValue valueWithCGPoint:CGPointMake(6.0, 70.5)],
nil
];
CGPoint tappedPoint = CGPointMake(23.0, 70.0);
if ([self isPointInPolygon:polygonVertices point:tappedPoint]) {
NSLog(@"YES");
} else {
NSLog(@"NO");
}
}
- Jon
2
2当然,在Objective-C中,
CGPathContainsPoint()是您的好朋友。 - Zev Eisenberg@ZevEisenberg 但那会太简单了!感谢提醒。我会在某个时候挖出那个项目,看看为什么我使用了自定义解决方案。我可能不知道
CGPathContainsPoint()的存在。 - Jon4
我已经用Python实现了nirg的C++代码(链接在此:nirg's code):
输入:
- bounding_points:构成多边形的节点。 - bounding_box_positions:需要过滤的候选点。(在我的实现中是由边界框创建的。) - (输入是元组列表,格式为:
返回:
- 所有在多边形内部的点。
再次强调,这个想法来自于这里。
输入:
- bounding_points:构成多边形的节点。 - bounding_box_positions:需要过滤的候选点。(在我的实现中是由边界框创建的。) - (输入是元组列表,格式为:
[(xcord, ycord), ...])返回:
- 所有在多边形内部的点。
def polygon_ray_casting(self, bounding_points, bounding_box_positions):
# Arrays containing the x- and y-coordinates of the polygon's vertices.
vertx = [point[0] for point in bounding_points]
verty = [point[1] for point in bounding_points]
# Number of vertices in the polygon
nvert = len(bounding_points)
# Points that are inside
points_inside = []
# For every candidate position within the bounding box
for idx, pos in enumerate(bounding_box_positions):
testx, testy = (pos[0], pos[1])
c = 0
for i in range(0, nvert):
j = i - 1 if i != 0 else nvert - 1
if( ((verty[i] > testy ) != (verty[j] > testy)) and
(testx < (vertx[j] - vertx[i]) * (testy - verty[i]) / (verty[j] - verty[i]) + vertx[i]) ):
c += 1
# If odd, that means that we are inside the polygon
if c % 2 == 1:
points_inside.append(pos)
return points_inside
再次强调,这个想法来自于这里。
- Noresourses
3
以下是nirg所提供答案的C#版本代码,仅分享代码以便节省他人时间。
public static bool IsPointInPolygon(IList<Point> polygon, Point testPoint) {
bool result = false;
int j = polygon.Count() - 1;
for (int i = 0; i < polygon.Count(); i++) {
if (polygon[i].Y < testPoint.Y && polygon[j].Y >= testPoint.Y || polygon[j].Y < testPoint.Y && polygon[i].Y >= testPoint.Y) {
if (polygon[i].X + (testPoint.Y - polygon[i].Y) / (polygon[j].Y - polygon[i].Y) * (polygon[j].X - polygon[i].X) < testPoint.X) {
result = !result;
}
}
j = i;
}
return result;
}
- Uğur Gümüşhan
1
这在大多数情况下是有效的,但是它是错误的并且不总是正常工作!使用M Katz的解决方案是正确的。 - Lukas Hanacek
3
VBA版本:
注意:如果您的多边形是地图内的区域,则纬度/经度是Y/X值,而不是X/Y(纬度=Y,经度=X),这是由于据我所了解的历史影响导致的,当时经度不是一种测量单位。
类模块:CPoint
Private pXValue As Double
Private pYValue As Double
'''''X Value Property'''''
Public Property Get X() As Double
X = pXValue
End Property
Public Property Let X(Value As Double)
pXValue = Value
End Property
'''''Y Value Property'''''
Public Property Get Y() As Double
Y = pYValue
End Property
Public Property Let Y(Value As Double)
pYValue = Value
End Property
模块:
Public Function isPointInPolygon(p As CPoint, polygon() As CPoint) As Boolean
Dim i As Integer
Dim j As Integer
Dim q As Object
Dim minX As Double
Dim maxX As Double
Dim minY As Double
Dim maxY As Double
minX = polygon(0).X
maxX = polygon(0).X
minY = polygon(0).Y
maxY = polygon(0).Y
For i = 1 To UBound(polygon)
Set q = polygon(i)
minX = vbMin(q.X, minX)
maxX = vbMax(q.X, maxX)
minY = vbMin(q.Y, minY)
maxY = vbMax(q.Y, maxY)
Next i
If p.X < minX Or p.X > maxX Or p.Y < minY Or p.Y > maxY Then
isPointInPolygon = False
Exit Function
End If
' SOURCE: http://www.ecse.rpi.edu/Homepages/wrf/Research/Short_Notes/pnpoly.html
isPointInPolygon = False
i = 0
j = UBound(polygon)
Do While i < UBound(polygon) + 1
If (polygon(i).Y > p.Y) Then
If (polygon(j).Y < p.Y) Then
If p.X < (polygon(j).X - polygon(i).X) * (p.Y - polygon(i).Y) / (polygon(j).Y - polygon(i).Y) + polygon(i).X Then
isPointInPolygon = True
Exit Function
End If
End If
ElseIf (polygon(i).Y < p.Y) Then
If (polygon(j).Y > p.Y) Then
If p.X < (polygon(j).X - polygon(i).X) * (p.Y - polygon(i).Y) / (polygon(j).Y - polygon(i).Y) + polygon(i).X Then
isPointInPolygon = True
Exit Function
End If
End If
End If
j = i
i = i + 1
Loop
End Function
Function vbMax(n1, n2) As Double
vbMax = IIf(n1 > n2, n1, n2)
End Function
Function vbMin(n1, n2) As Double
vbMin = IIf(n1 > n2, n2, n1)
End Function
Sub TestPointInPolygon()
Dim i As Integer
Dim InPolygon As Boolean
' MARKER Object
Dim p As CPoint
Set p = New CPoint
p.X = <ENTER X VALUE HERE>
p.Y = <ENTER Y VALUE HERE>
' POLYGON OBJECT
Dim polygon() As CPoint
ReDim polygon(<ENTER VALUE HERE>) 'Amount of vertices in polygon - 1
For i = 0 To <ENTER VALUE HERE> 'Same value as above
Set polygon(i) = New CPoint
polygon(i).X = <ASSIGN X VALUE HERE> 'Source a list of values that can be looped through
polgyon(i).Y = <ASSIGN Y VALUE HERE> 'Source a list of values that can be looped through
Next i
InPolygon = isPointInPolygon(p, polygon)
MsgBox InPolygon
End Sub
- Colin Stadig
网页内容由stack overflow 提供, 点击上面的可以查看英文原文,
原文链接
原文链接
point.within(polygon),它会返回一个布尔值,表示点是否在多边形内部。 - J Agustin Barrachina