我需要找到两个三维点云之间的变换和旋转差异。为此,我正在寻找 Point Cloud Library,因为它看起来很理想。
在干净的测试数据上,我已经使用了迭代最近点(ICP),但是得到了奇怪的结果(尽管我可能实现不正确)。 我已经使用了 pcl::estimateRigidTransformation,并且它似乎更好,尽管我认为将处理嘈杂的数据更糟。
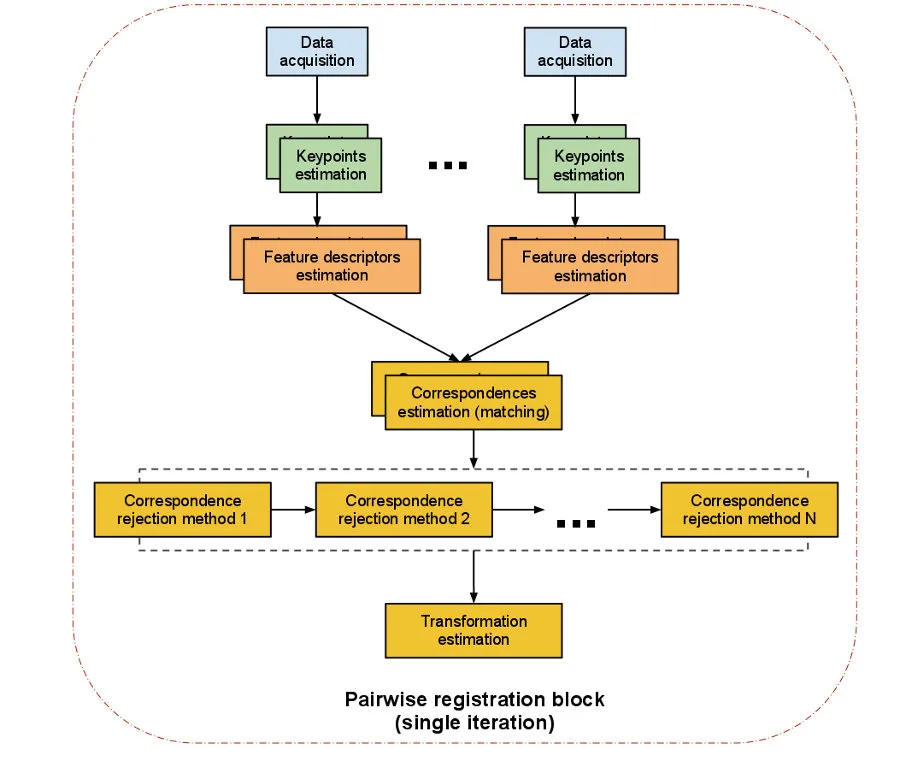
我的问题是: 这两个点云将是嘈杂的,虽然它们应该包含相同的点,但会存在一些差异。如何处理最好? 首先,我应该找到两个点云中的对应特征,然后使用estimateTransform吗?还是应该查看RANSAC函数以去除异常值?ICP比estimateRigidTransform更好吗?
在干净的测试数据上,我已经使用了迭代最近点(ICP),但是得到了奇怪的结果(尽管我可能实现不正确)。 我已经使用了 pcl::estimateRigidTransformation,并且它似乎更好,尽管我认为将处理嘈杂的数据更糟。
我的问题是: 这两个点云将是嘈杂的,虽然它们应该包含相同的点,但会存在一些差异。如何处理最好? 首先,我应该找到两个点云中的对应特征,然后使用estimateTransform吗?还是应该查看RANSAC函数以去除异常值?ICP比estimateRigidTransform更好吗?