我正在创建一个二维物理引擎,但在可移动和不可移动物体之间的某种类型的碰撞中遇到了问题。所谓可移动是指(x,y)值可以改变,而不是参考框架可以或不能改变。
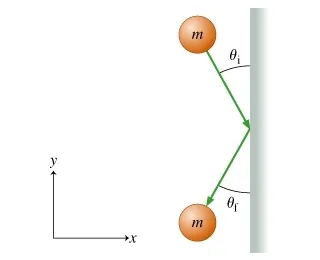
例如,球撞击墙壁就是可移动物体与不可移动物体碰撞的一种情况。
例如,球撞击墙壁就是可移动物体与不可移动物体碰撞的一种情况。
我相信在这种情况下需要使用类似于法向力的东西,但我不确定如何用它来找到碰撞的结果。
以下是我目前拥有的代码。这段代码用于两个移动实体之间的碰撞,但我需要添加一个当其中一个实体不移动时的情况:
private static void UpdateEntities(PhysicsEntity a, PhysicsEntity b)
{
var collisionAngle = Math.Atan2(a.Position.Y - b.Position.Y, a.Position.X - b.Position.X);
var angleA = a.Velocity.Direction - collisionAngle;
var angleB = b.Velocity.Direction - collisionAngle;
var vAx = a.Velocity.Magnitude * Math.Cos(angleA);
var vAy = a.Velocity.Magnitude * Math.Sin(angleA);
var vBx = b.Velocity.Magnitude * Math.Cos(angleB);
var vBy = b.Velocity.Magnitude * Math.Sin(angleB);
var vfAx = ((vAx * (a.Mass - b.Mass) + 2 * b.Mass * vBx) / (a.Mass + b.Mass)) * a.Material.Elasticity;
var vfBx = ((vBx * (b.Mass - a.Mass) + 2 * a.Mass * vAx) / (a.Mass + b.Mass)) * b.Material.Elasticity;
var vfAy = vAy * a.Material.Elasticity;
var vfBy = vBy * b.Material.Elasticity;
var magA = Math.Sqrt(Math.Pow(vfAx, 2) + Math.Pow(vfAy, 2));
var magB = Math.Sqrt(Math.Pow(vfBx, 2) + Math.Pow(vfBy, 2));
var dirA = Math.Atan2(vfAy, vfAx) + collisionAngle;
var dirB = Math.Atan2(vfBy, vfBx) + collisionAngle;
a.Velocity.X = magA * Math.Cos(dirA);
a.Velocity.Y = magA * Math.Sin(dirA);
b.Velocity.X = magB * Math.Cos(dirB);
b.Velocity.Y = magB * Math.Sin(dirB);
}
我尝试将不可移动物体的速度设置为可移动物体速度的相反方向,但这导致物体相互穿透。
a和b。它们中哪一个是不可移动的,为什么要设置它的速度? - Betaa和b的代码适用于所有碰撞。它们都不必是不可移动的,但我需要添加一个当其中一个不可移动时的情况。已更新问题以更具体。 - Jedi_Maseter_Sam